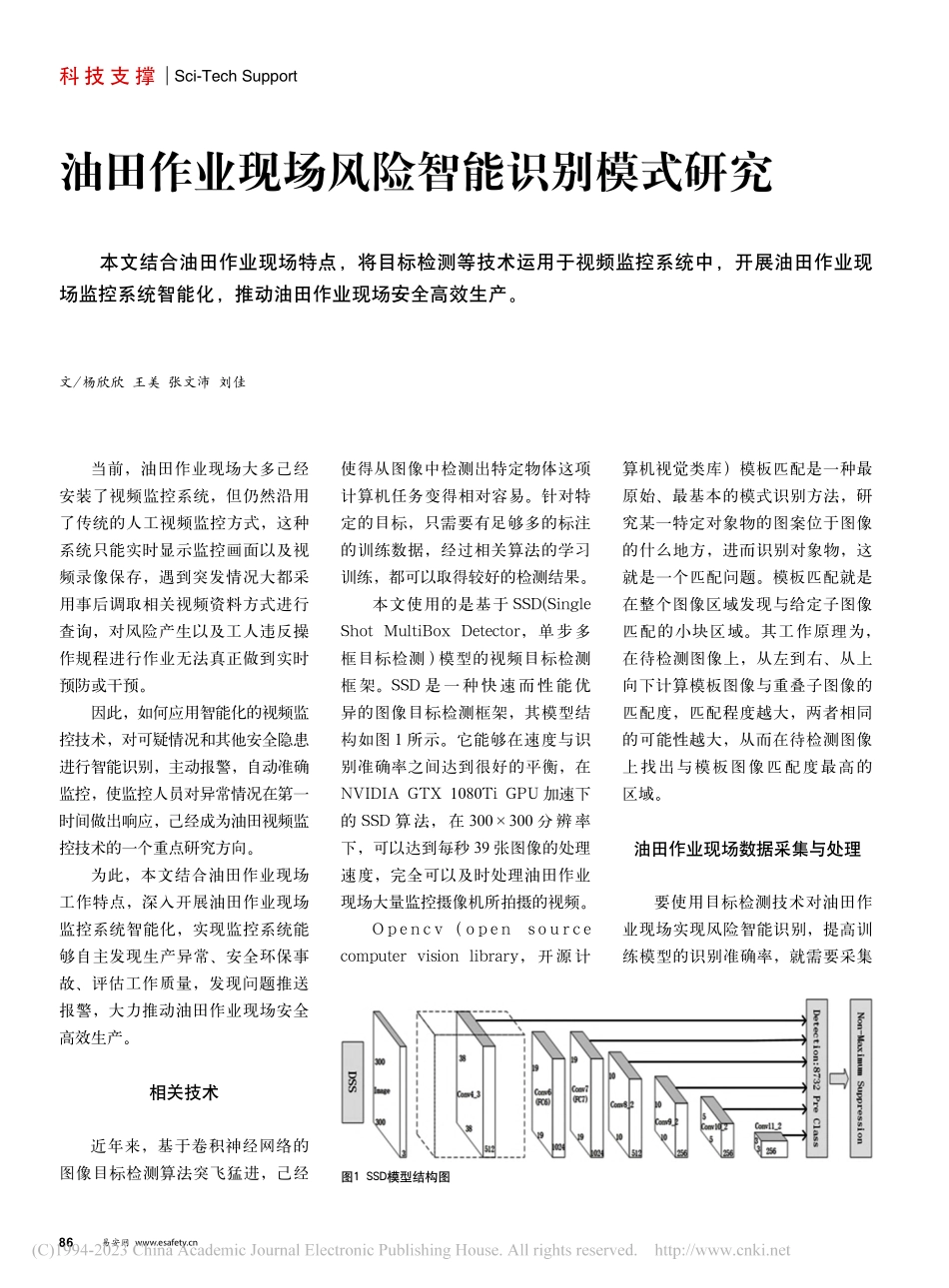
科技支撑86易安网www.esafety.cnSci-TechSupport当前,油田作业现场大多己经安装了视频监控系统,但仍然沿用了传统的人工视频监控方式,这种系统只能实时显示监控画面以及视频录像保存,遇到突发情况大都采用事后调取相关视频资料方式进行查询,对风险产生以及工人违反操作规程进行作业无法真正做到实时预防或干预。因此,如何应用智能化的视频监控技术,对可疑情况和其他安全隐患进行智能识别,主动报警,自动准确监控,使监控人员对异常情况在第一时间做出响应,己经成为油田视频监控技术的一个重点研究方向。为此,本文结合油田作业现场工作特点,深入开展油田作业现场监控系统智能化,实现监控系统能够自主发现生产异常、安全环保事故、评估工作质量,发现问题推送报警,大力推动油田作业现场安全高效生产。相关技术近年来,基于卷积神经网络的图像目标检测算法突飞猛进,己经使得从图像中检测出特定物体这项计算机任务变得相对容易。针对特定的目标,只需要有足够多的标注的训练数据,经过相关算法的学习训练,都可以取得较好的检测结果。本文使用的是基于SSD(SingleShotMultiBoxDetector,单步多框目标检测)模型的视频目标检测框架。SSD是一种快速而性能优异的图像目标检测框架,其模型结构如图1所示。它能够在速度与识别准确率之间达到很好的平衡,在NVIDIAGTX1080TiGPU加速下的SSD算法,在300×300分辨率下,可以达到每秒39张图像的处理速度,完全可以及时处理油田作业现场大量监控摄像机所拍摄的视频。Opencv(opensourcecomputervisionlibrary,开源计算机视觉类库)模板匹配是一种最原始、最基本的模式识别方法,研究某一特定对象物的图案位于图像的什么地方,进而识别对象物,这就是一个匹配问题。模板匹配就是在整个图像区域发现与给定子图像匹配的小块区域。其工作原理为,在待检测图像上,从左到右、从上向下计算模板图像与重叠子图像的匹配度,匹配程度越大,两者相同的可能性越大,从而在待检测图像上找出与模板图像匹配度最高的区域。油田作业现场数据采集与处理要使用目标检测技术对油田作业现场实现风险智能识别,提高训练模型的识别准确率,就需要采集本文结合油田作业现场特点,将目标检测等技术运用于视频监控系统中,开展油田作业现场监控系统智能化,推动油田作业现场安全高效生产。油田作业现场风险智能识别模式研究文/杨欣欣王美张文沛刘佳图1SSD模型结构图科技支撑Sci-TechSupport872023.2劳动保护大量的油田作业现场...