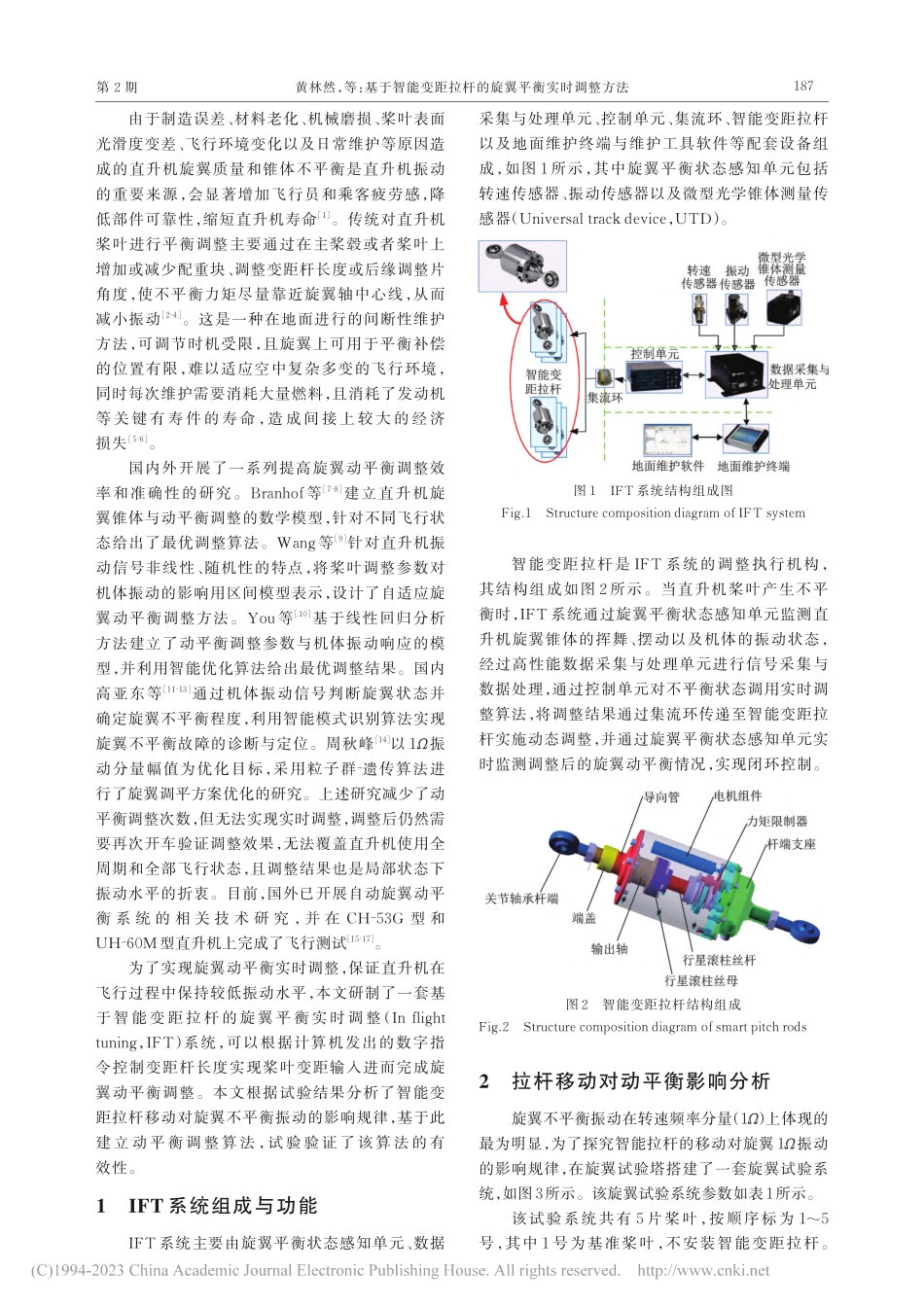
第55卷第2期2023年4月Vol.55No.2Apr.2023南京航空航天大学学报JournalofNanjingUniversityofAeronautics&Astronautics基于智能变距拉杆的旋翼平衡实时调整方法黄林然1,孙灿飞1,2,赵英梅1,彭德润1,胡斌1,程攀1,莫胜波3(1.航空工业上海航空测控技术研究所,上海201601;2.故障诊断与健康管理技术航空科技重点实验室,上海201601;3.航空工业兰州飞行控制有限责任公司,兰州730070)摘要:旋翼不平衡是造成直升机振动的重要原因,而传统旋翼平衡调整是一种定期维护方法,耗时长且无法长时间保持维护后的振动水平。本文研制了一套基于智能变距拉杆的旋翼平衡实时调整(Inflighttuning,IFT)系统,可以根据计算机发出的数字指令控制智能变距拉杆长度实现桨叶变距输入,进而完成旋翼动平衡调整。试验发现智能变距拉杆杆端位移量对旋翼转频振动分量的影响呈线性规律,由此确定拉杆调整系数矩阵。当获取旋翼不平衡振动信息后,根据相位选择相应拉杆作为调整器,根据振幅在调整矢量方向投影的大小关系设计了调整策略,得到拉杆完成平衡调整所需的位移量。通过旋翼塔试验验证了该方法的有效性,结果表明该方法可以在直升机飞行过程中实时降低旋翼振动水平,有效提高了旋翼动平衡调整效率。关键词:直升机振动;旋翼平衡实时调整系统;智能变距拉杆;旋翼塔试验中图分类号:TB53文献标志码:A文章编号:1005-2615(2023)02-0186-07RealTimeAdjustmentMethodofRotorBalanceBasedonSmartPitchRodHUANGLinran1,SUNCanfei1,2,ZHAOYingmei1,PENGDerun1,HUBin1,CHENGPan1,MOShengbo3(1.AVICShanghaiAeroMeasurementControllingResearchInstitute,Shanghai201601,China;2.AviationKeyLaboratoryofScienceandTechnologyonFaultDiagnosisandHealthManagement,Shanghai201601,China;3.AVICLanzhouFlightControlCo.,Ltd.,Lanzhou730070,China)Abstract:Rotorimbalanceisanimportantcauseofhelicoptervibration.Thetraditionalrotorbalancingadjustmentisaperiodicmaintenancemethod,whichtakesalongtimeandcannotmaintainthevibrationlevelaftermaintenanceforalongtime.Therefore,aninlighttuning(IFT)systembasedonsmartpitchrodisdeveloped,whichcancontrolthelengthofsmartpitchrodsaccordingtothedigitalcommandsentbythecomputer,realizethevariablepitchinputofblade,andthencompletetherotordynamicbalanceadjustment.Itisfoun...