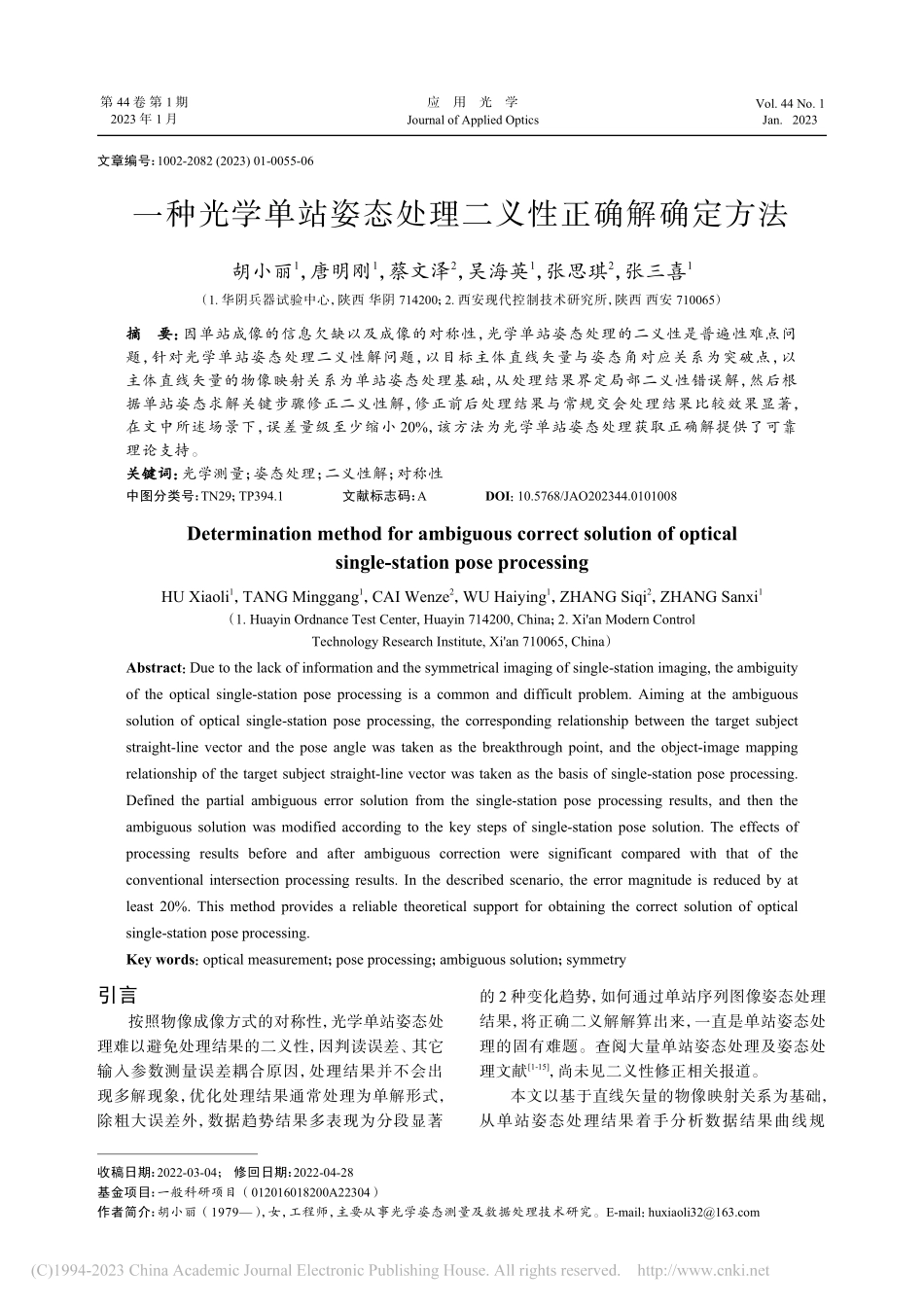
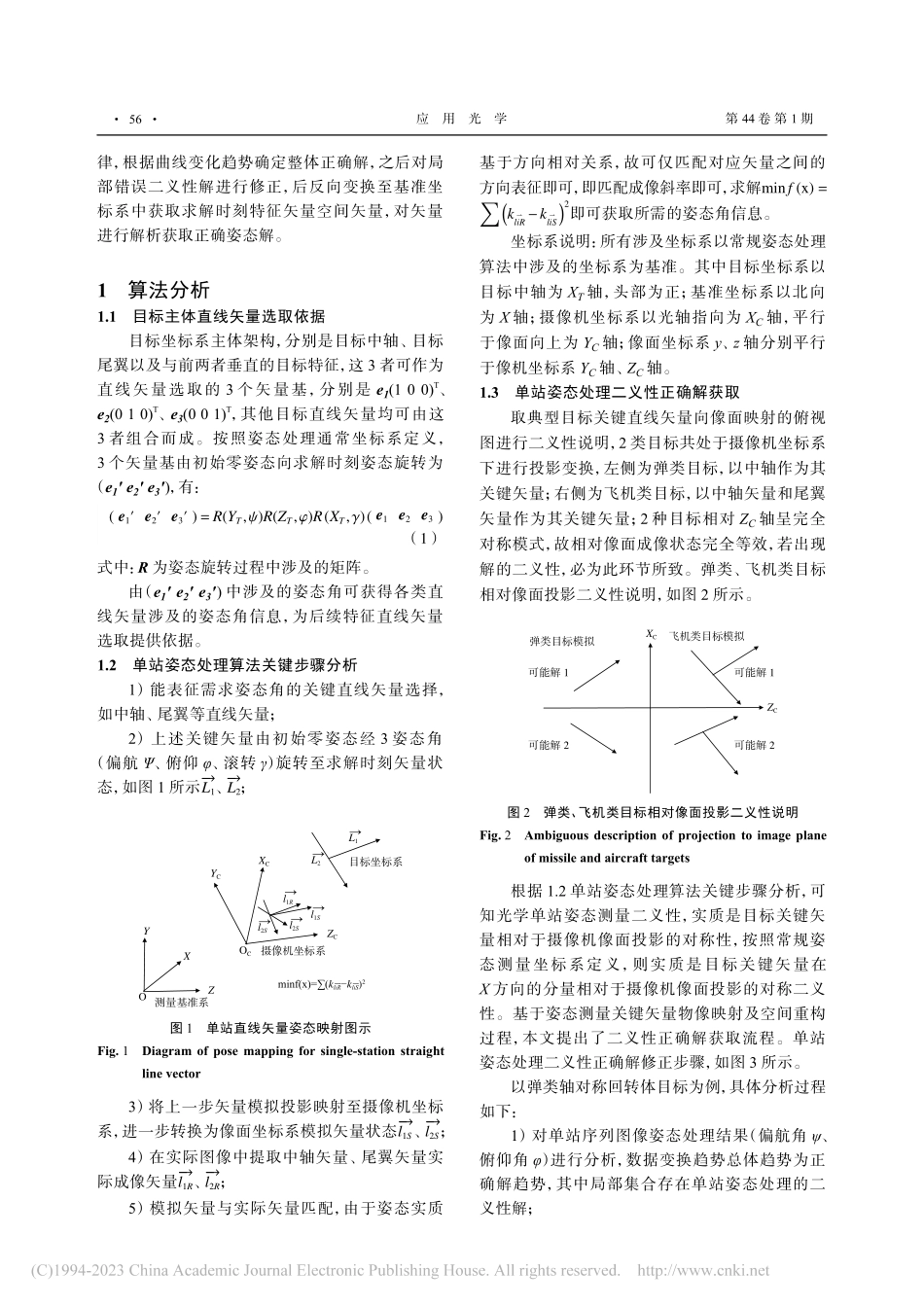
文章编号:1002-2082(2023)01-0055-06一种光学单站姿态处理二义性正确解确定方法胡小丽1,唐明刚1,蔡文泽2,吴海英1,张思琪2,张三喜1(1.华阴兵器试验中心,陕西华阴714200;2.西安现代控制技术研究所,陕西西安710065)摘要:因单站成像的信息欠缺以及成像的对称性,光学单站姿态处理的二义性是普遍性难点问题,针对光学单站姿态处理二义性解问题,以目标主体直线矢量与姿态角对应关系为突破点,以主体直线矢量的物像映射关系为单站姿态处理基础,从处理结果界定局部二义性错误解,然后根据单站姿态求解关键步骤修正二义性解,修正前后处理结果与常规交会处理结果比较效果显著,在文中所述场景下,误差量级至少缩小20%,该方法为光学单站姿态处理获取正确解提供了可靠理论支持。关键词:光学测量;姿态处理;二义性解;对称性中图分类号:TN29;TP394.1文献标志码:ADOI:10.5768/JAO202344.0101008Determinationmethodforambiguouscorrectsolutionofopticalsingle-stationposeprocessingHUXiaoli1,TANGMinggang1,CAIWenze2,WUHaiying1,ZHANGSiqi2,ZHANGSanxi1(1.HuayinOrdnanceTestCenter,Huayin714200,China;2.Xi'anModernControlTechnologyResearchInstitute,Xi'an710065,China)Abstract:Duetothelackofinformationandthesymmetricalimagingofsingle-stationimaging,theambiguityoftheopticalsingle-stationposeprocessingisacommonanddifficultproblem.Aimingattheambiguoussolutionofopticalsingle-stationposeprocessing,thecorrespondingrelationshipbetweenthetargetsubjectstraight-linevectorandtheposeanglewastakenasthebreakthroughpoint,andtheobject-imagemappingrelationshipofthetargetsubjectstraight-linevectorwastakenasthebasisofsingle-stationposeprocessing.Definedthepartialambiguouserrorsolutionfromthesingle-stationposeprocessingresults,andthentheambiguoussolutionwasmodifiedaccordingtothekeystepsofsingle-stationposesolution.Theeffectsofprocessingresultsbeforeandafterambiguouscorrectionweresignificantcomparedwiththatoftheconventionalintersectionprocessingresults.Inthedescribedscenario,theerrormagnitudeisreducedbyatleast20%.Thismethodprovidesareliabletheoreticalsupportforobtainingthecorrectsolutionofopticalsingle-stationposeprocessing.Keywords:opticalmeasurem...