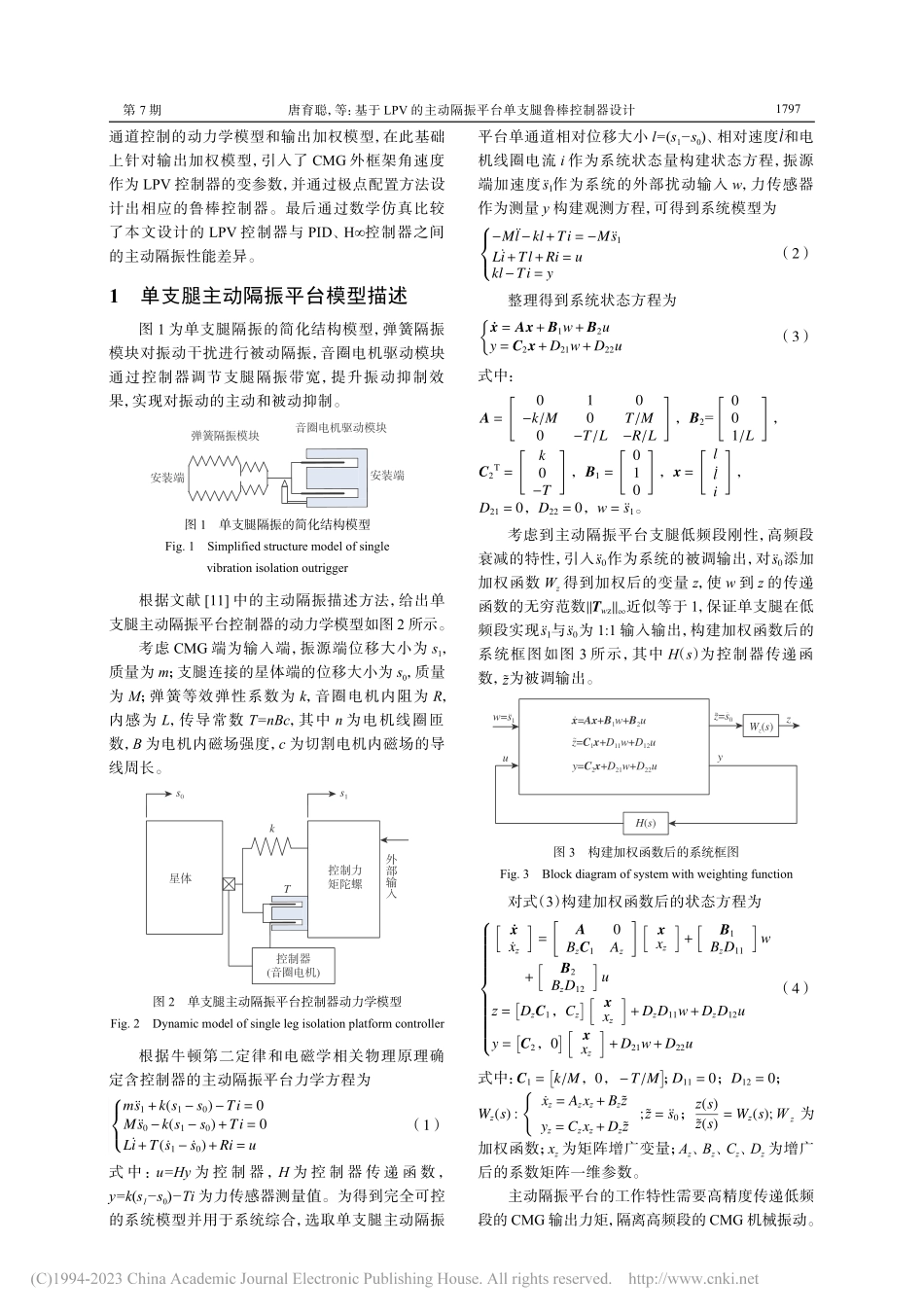
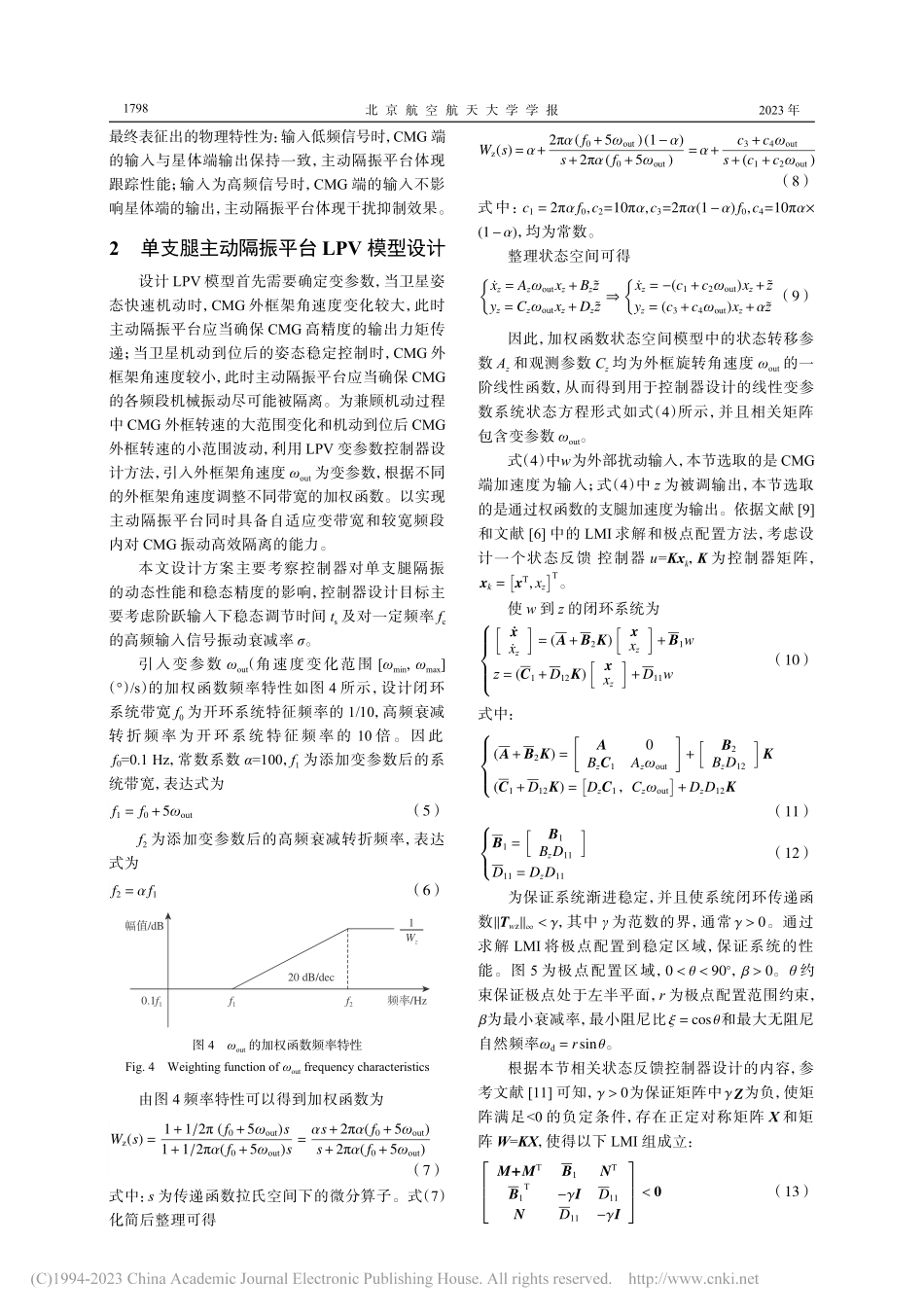
http://bhxb.buaa.edu.cnjbuaa@buaa.edu.cnDOI:10.13700/j.bh.1001-5965.2021.0513基于LPV的主动隔振平台单支腿鲁棒控制器设计唐育聪,朱庆华*,刘付成,曹赫扬(上海航天控制技术研究所,上海201109)摘要:利用控制力矩陀螺(CMG)实现敏捷姿态机动控制时,保证机动过程控制输出力矩快速响应的同时,还需要保证机动到位后有效隔离CMG的机械振动以实现高稳定度姿态控制。针对控制CMG主动隔振平台,将控制CMG外框角速度作为变参数,提出单支腿主动隔振平台控制器的一种基于线性变参数(LPV)控制设计实现方法,通过与其他主动隔振控制方法性能比较分析,所提方法在兼顾敏捷姿态机动期间和机动到位后对主动隔振平台不同的力学传递要求方面有更好的性能。关键词:控制力矩陀螺;主动隔振;姿态机动;线性变参数;鲁棒控制中图分类号:TP273文献标志码:A文章编号:1001-5965(2023)07-1796-06敏捷姿态机动卫星的执行机构均选用控制力矩陀螺群(controlmomentgyros,CMGs)以保证其快速机动性能。为提高姿态机动到位后卫星的姿态稳定度,需要对CMGs配套安装隔振平台,以消除CMG的机械振动对姿态稳定度的影响。在对CMG进行隔振时,主动隔振方式虽然工程代价相对较高,但可以获取比被动隔振方式更好的振动抑制性能。主动隔振平台的控制器可以采用不同的方法设计和实现,传统的比例积分微分(proportionintegralderivative,PID)控制器可以得到低转折频率且没有谐振的响应特性。当卫星根据机动任务需求可以自主调节CMGs的响应快慢时,需要CMGs根据需求调节其外框最大转速以具备不同的力矩输出能力,当CMGs的外框转速根据机动任务不断动态调整时,对其主动隔振平台的参数适应性提出了新的需求,固定转折频率的主动隔振平台已不能完全适应。目前较为广泛应用于主动隔振平台的控制器有PID[1-2]、H∞[2]控制器等,2种控制器都能起到较好的隔振效果,但也存在参数适应性的局限性,无法兼顾不同机动需求下CMGs变带宽工况的高精度力矩传递和高性能隔振。为改善这一情况,考虑应用线性变参数(linearparametervarying,LPV)控制器,根据系统中实时可测的变参数来改变控制器的增益,并依靠H∞控制器的范数度量,使变参数能够直接影响控制器的参数。现有LPV控制器广泛用于高速飞行器等变参数范围广、速率快的背景下,对主动隔振平台的控制器设计应用较少。文献[3-5]介绍了LPV控制器的相关概念和求解过程,文献[6-7]介绍了凸分解方法,文献[8]介绍了高阶奇异值分解(h...