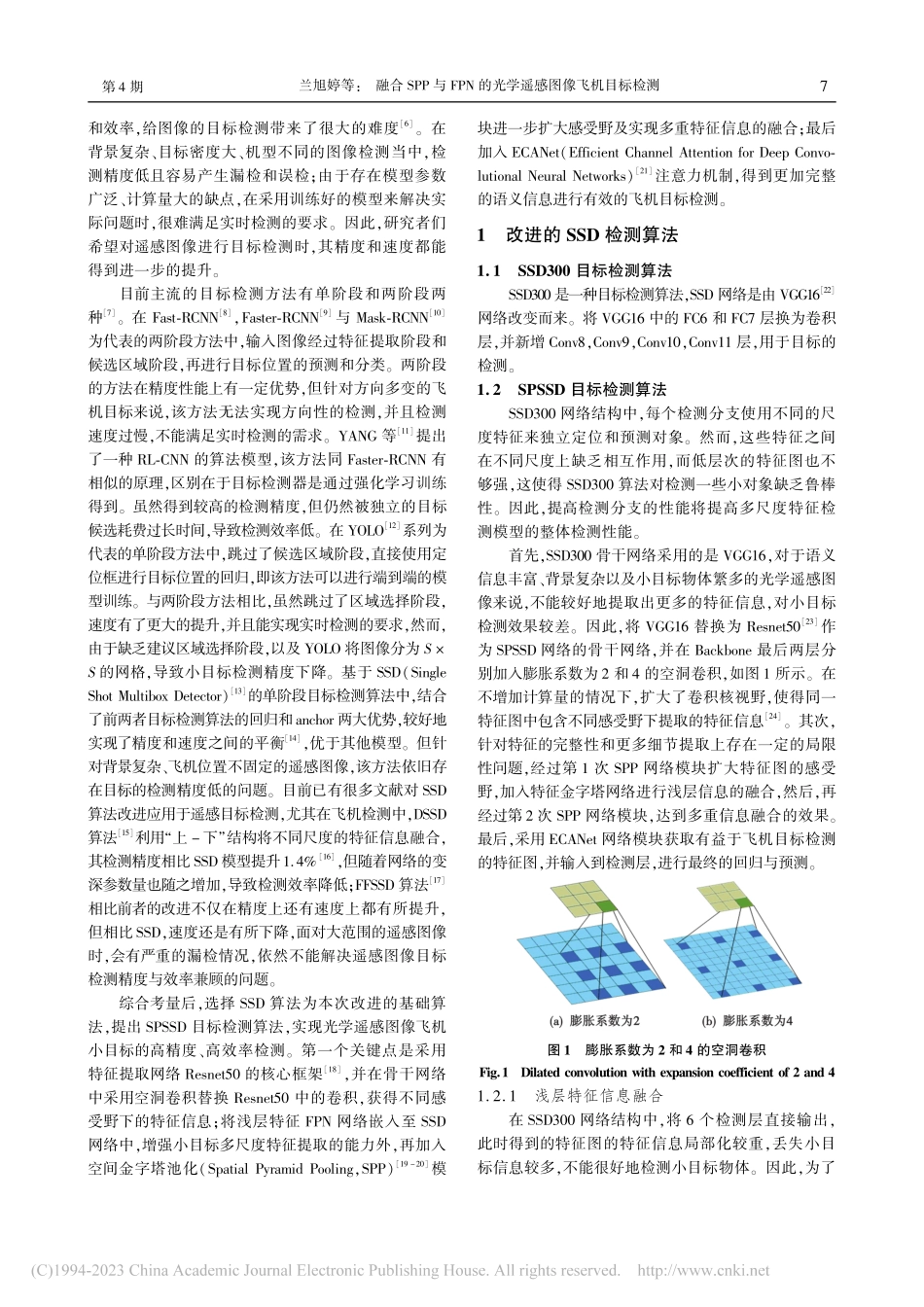
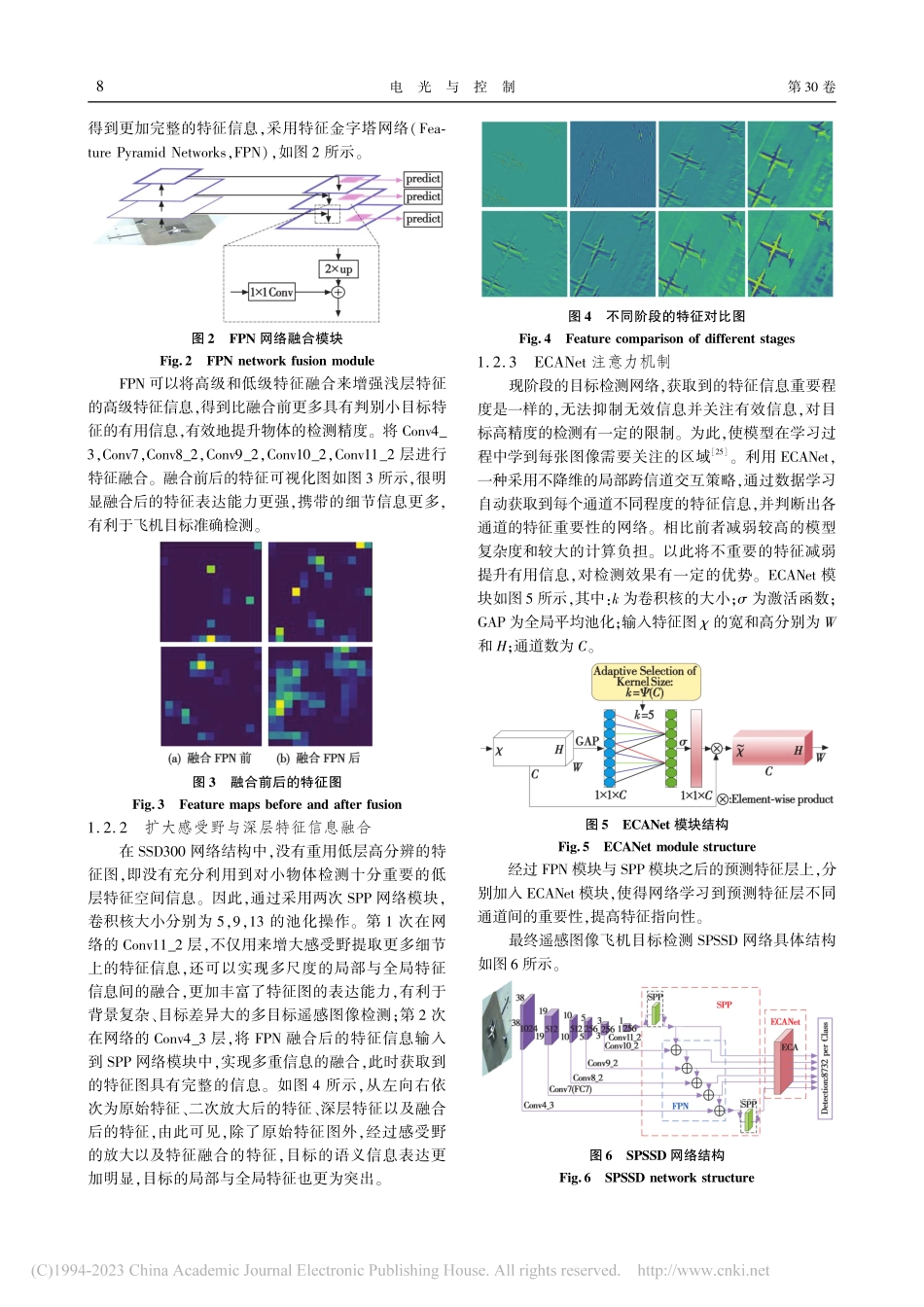
引用格式:兰旭婷,郭中华,石甜甜,等.融合SPP与FPN的光学遥感图像飞机目标检测[J].电光与控制,2023'30(4):6⁃11.LANXT'GUOZH'SHITT'etal.AircrafttargetdetectioninopticalremotesensingimagesbasedonSPPandFPNfusion[J].ElectronicsOptics&Control'2023'30(4):6⁃11.融合SPP与FPN的光学遥感图像飞机目标检测兰旭婷a,郭中华a,b,石甜甜a,陈天蕴a,孙亚萍a,高翔a(宁夏大学,a.物理与电子电气工程学院;b.沙漠信息智能感知重点实验室,银川750000)摘要:针对光学遥感图像飞机目标背景复杂、检测精度与检测速度不平衡、易漏检等问题,提出一种融合不同网络模块的SPSSD模型。首先,采用Resnet50替换SSD300算法中的特征提取网络,并加入可操控的空洞卷积模块,扩大特征感受野获取更多有利检测目标的特征信息;其次,加入FPN和SPP网络,得到浅层特征信息,并将感受野二次放大后的特征与深层特征信息进行融合;然后,送入ECANet网络中获取更加完整且更具有判断力的特征信息;最后,采用NWPU⁃RESISC45数据集3400张高分辨率飞机遥感图像输入至SPSSD模型中迭代训练,最终改进算法模型mAP值达到92.68%,较改进前的算法模型提升了5.18个百分点,检测速度达到25.1帧/s。实验结果表明,该方法可以有效兼顾飞机目标的检测精度与检测速度,一定程度上降低了目标漏检率。关键词:遥感图像;目标检测;注意力机制;特征融合中图分类号:TP753文献标志码:Adoi:10.3969/j.issn.1671-637X.2023.04.002AircraftTargetDetectioninOpticalRemoteSensingImagesBasedonSPPandFPNFusionLANXutinga'GUOZhonghuaa'b'SHITiantiana'CHENTianyuna'SUNYapinga'GAOXianga(NingxiaUniversity'a.SchoolofPhysicsandElectronicandElectricalEngineering;b.KeyLaboratoryofDesertInformatio...