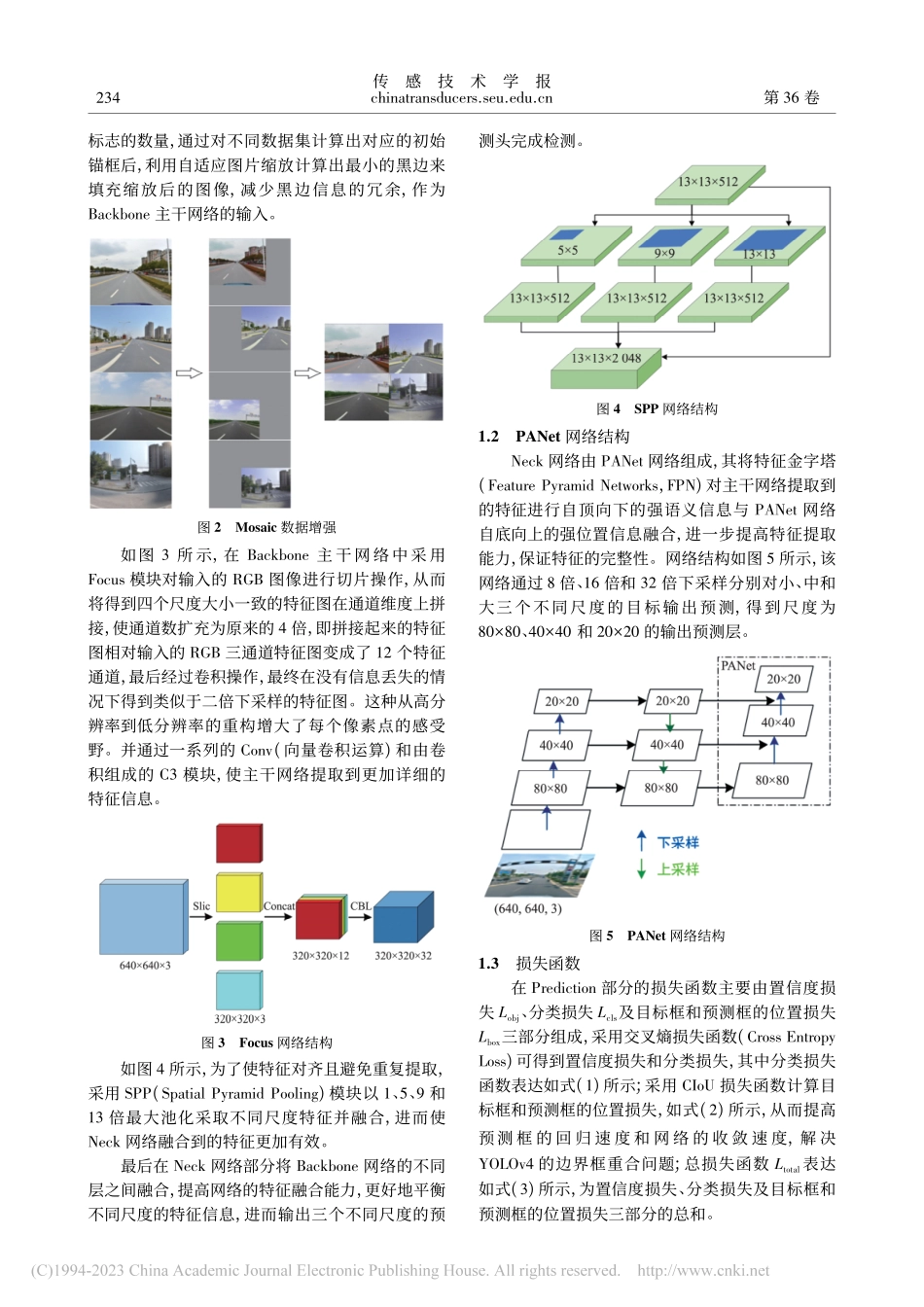
第36卷第2期2023年2月传感技术学报CHINESEJOURNALOFSENSORSANDACTUATORSVol.36No.2Feb.2023项目来源:贵州省科学技术基金资助项目(黔科合基础[2016]1054);贵州省联合资金资助项目(黔科合LH字[2017]7226号);贵州大学2017年度学术新苗培养及创新探索专项项目(黔科合平台人才[2017]5788)收稿日期:2022-04-11修改日期:2022-05-26FusionTransformerandImprovedPANetforYOLOv5sTrafficSignDetection*ZHANGQian1,LIUZiyan1,2,3*,CHENYunlei1,WUYingyu1,ZHENGXuhui1(1.CollegeofBigDataandInformationEngineering,GuizhouUniversity,GuiyangGuizhou550025,China;2.StateKeyLaboratoryofPublicBigData,GuizhouUniversity,GuiyangGuizhou550025,China;3.InstituteofComputingTechnology,ChineseAcademyofSciences,Beijing100190,China)Abstract:Aimingatissuesoflowspeedoftrafficsigndetectionandextremeimbalanceoftargetsizeandcategory,aYOLOv5strafficsigndetectionalgorithmoffusedTransformerandimprovedPANetnetworkisproposed.Firstly,withoutincreasingmodelcomplexity,theendofbackbonenetworkisfusedwithTransformertoimprovenetworkfeatureextractioncapability.Secondly,thesmallsizeoftargetscaleintrafficsigndatasetscausespoordetectioneffectsofthescaledetectionlayerswithascaleof32timeslarger,thuscorrelationnetworklayersisnotused,andK-meansalgorithmisadoptedtoyieldappropriatepredictioncandidateframes.Thenthelossfunctionsisimprovedtoaddressextremeimbalanceproblemsbetweenpositiveandnegativesamples.Finally,theproposedalgorithmisappliedonJetsonAGXXavierplatformforvalidation.Experimentalresultsdemonstratethattheproposedalgorithmachievesbetterperformance,thedetectionprecisionandrecallrateimprove2.2%and0.7%,respectively,andthenumberofmodelparametersandcomputationalcomplexityreduce25.8%and10.1%respectivelyincomparisonwiththeoriginalnetwork.Thedetectionspeedof76FPSonXaviermeetstherequirementsforreal-timetrafficsigndetection,whichiseasilydeployedinrealscenarios.Keywords:trafficsigndetection;JetsonAGXXavier;Transformer;PANet;YOLOv5sEEACC:7230doi:10.3969/j.issn.1004-1699.2023.02.010融合Transformer和改进P...