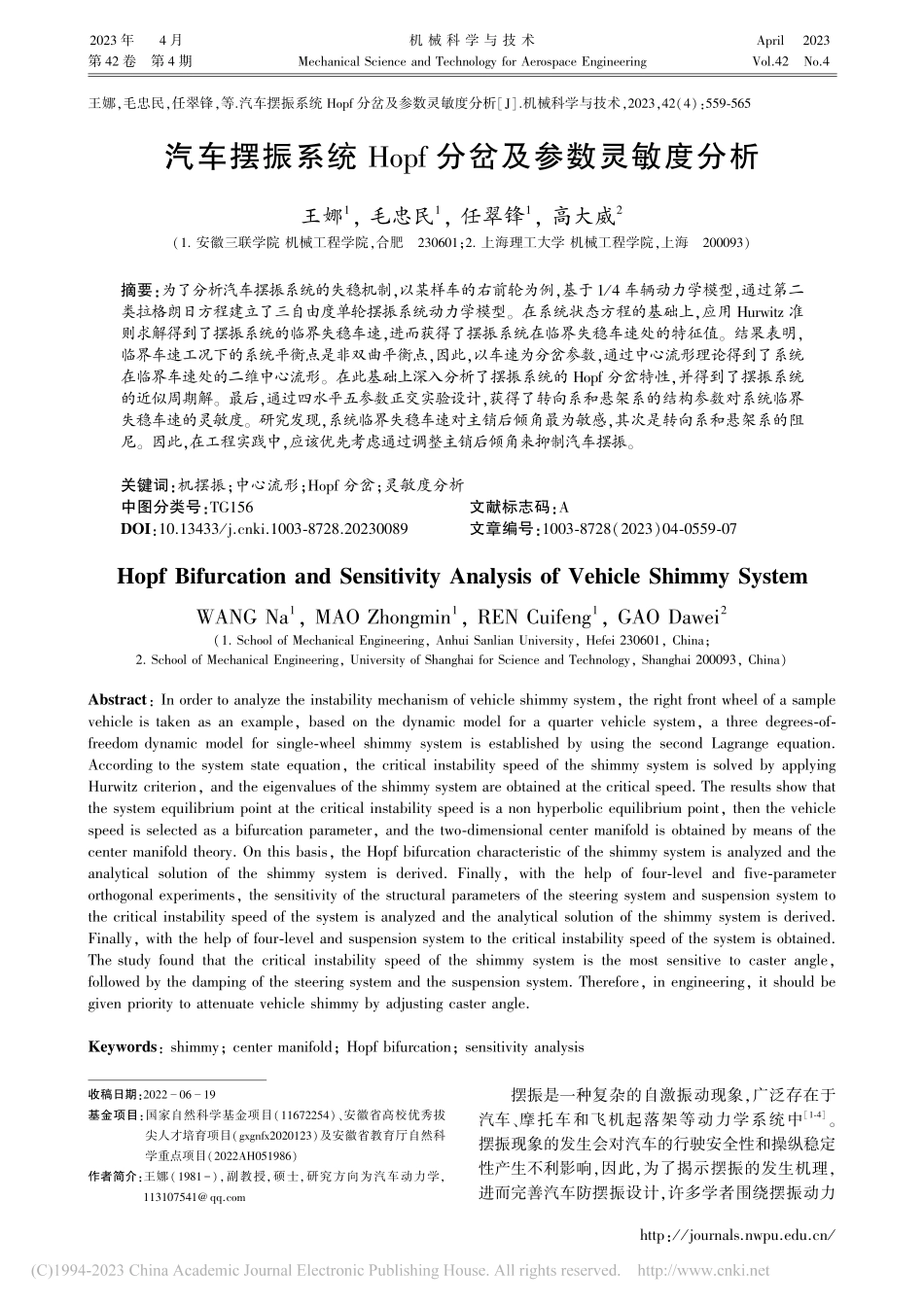
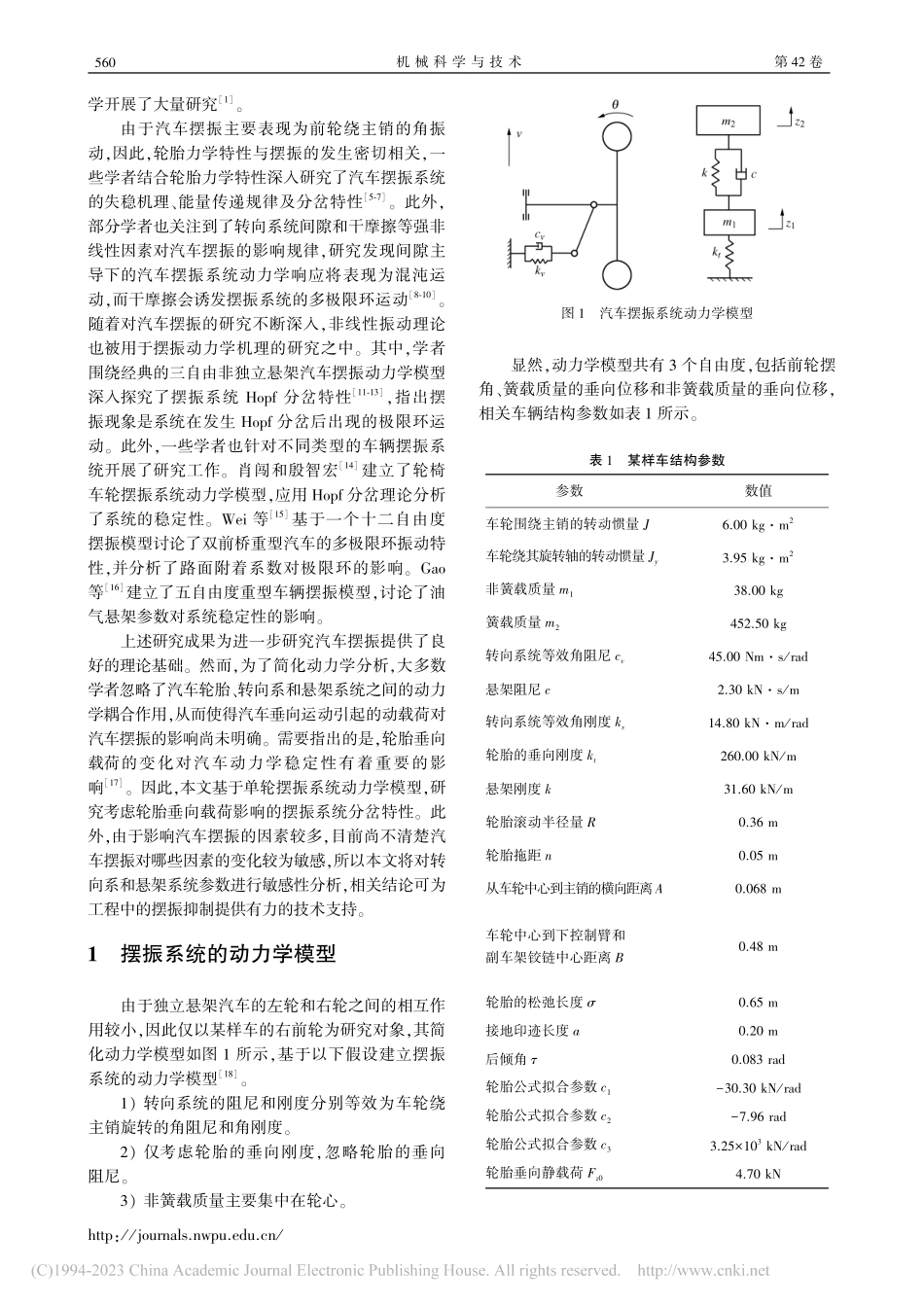
2023年第42卷4月第4期机械科学与技术MechanicalScienceandTechnologyforAerospaceEngineeringAprilVol.422023No.4http://journals.nwpu.edu.cn/收稿日期:20220619基金项目:国家自然科学基金项目(11672254)、安徽省高校优秀拔尖人才培育项目(gxgnfx2020123)及安徽省教育厅自然科学重点项目(2022AH051986)作者简介:王娜(1981-),副教授,硕士,研究方向为汽车动力学,113107541@qq.com王娜,毛忠民,任翠锋,等.汽车摆振系统Hopf分岔及参数灵敏度分析[J].机械科学与技术,2023,42(4):559⁃565汽车摆振系统Hopf分岔及参数灵敏度分析王娜1,毛忠民1,任翠锋1,高大威2(1.安徽三联学院机械工程学院,合肥230601;2.上海理工大学机械工程学院,上海200093)摘要:为了分析汽车摆振系统的失稳机制,以某样车的右前轮为例,基于1/4车辆动力学模型,通过第二类拉格朗日方程建立了三自由度单轮摆振系统动力学模型。在系统状态方程的基础上,应用Hurwitz准则求解得到了摆振系统的临界失稳车速,进而获得了摆振系统在临界失稳车速处的特征值。结果表明,临界车速工况下的系统平衡点是非双曲平衡点,因此,以车速为分岔参数,通过中心流形理论得到了系统在临界车速处的二维中心流形。在此基础上深入分析了摆振系统的Hopf分岔特性,并得到了摆振系统的近似周期解。最后,通过四水平五参数正交实验设计,获得了转向系和悬架系的结构参数对系统临界失稳车速的灵敏度。研究发现,系统临界失稳车速对主销后倾角最为敏感,其次是转向系和悬架系的阻尼。因此,在工程实践中,应该优先考虑通过调整主销后倾角来抑制汽车摆振。关键词:机摆振;中心流形;Hopf分岔;灵敏度分析中图分类号:TG156文献标志码:ADOI:10.13433/j.cnki.1003⁃8728.20230089文章编号:1003⁃8728(2023)04⁃0559⁃07HopfBifurcationandSensitivityAnalysisofVehicleShimmySystemWANGNa1,MAOZhongmin1,RENCuifeng1,GAODawei2(1.SchoolofM...