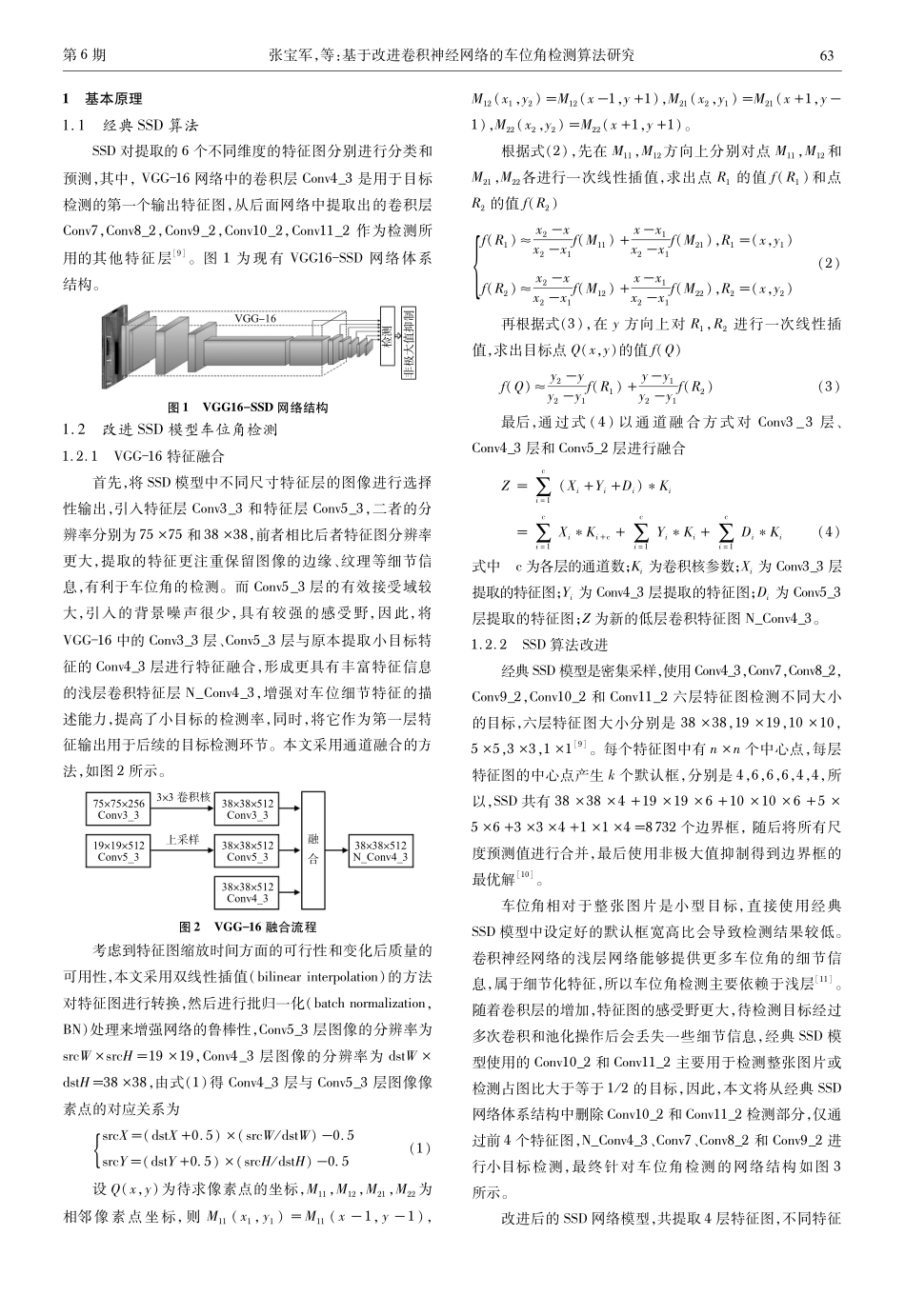
传感器与微系统(TransducerandMicrosystemTechnologies)2023年第42卷第6期DOI:10.13873/J.1000—9787(2023)06—0062—04基于改进卷积神经网络的车位角检测算法研究张宝军,王钊璇,李孰非(西安邮电大学电子工程学院,陕西西安710121)摘要:针对自动泊车系统从视频中提取到的每帧图片用传统的SSD算法检测目标时,会出现小目标检测效果不理想的问题,提出一种基于改进SSD网络模型的车位角检测算法。改进后的模型将Conv3_3层、Conv5_3层与原本提取小目标特征的Conv4_3层进行特征融合,形成新的输出特征层N_Conv4_3,并删减掉原网络模型中检测大目标和中等目标的Conv10_2层和Conv11_2层。实验结果表明:与SSD_MobileNet、FasterRCNN和经典SSD模型相比,改进后的模型在不同环境下对L型和T型车位角的检测准确率、召回率和F1均有提高,可以满足泊车实时检测的要求。关键词:SSD;特征融合;车位角;目标检测;卷积神经网络中图分类号:TP212;TP391.41文献标识码:A文章编号:1000—9787(2023)06—0062—04ResearchonparkingangledetectionalgorithmbasedonimprovedCNNZHANGBaojun,WANGZhaoxuan,LIShufei(SchoolofElectronicEngineering,Xi’anUniversityofPostsandTelecommunications,Xi’an710121,China)Abstract:Inordertosolvetheproblemofunsatisfactorysmalltargetdetectioneffectwheneachframeofimagesextractedfromvideo,traditionalSSDalgorithmsareusedinautomaticparkingsystems,animprovednetworkbasedonsingleshotdetector(SSD)isproposedforparkingangledetection.TheimprovedmodelcombinestheConv3_3...