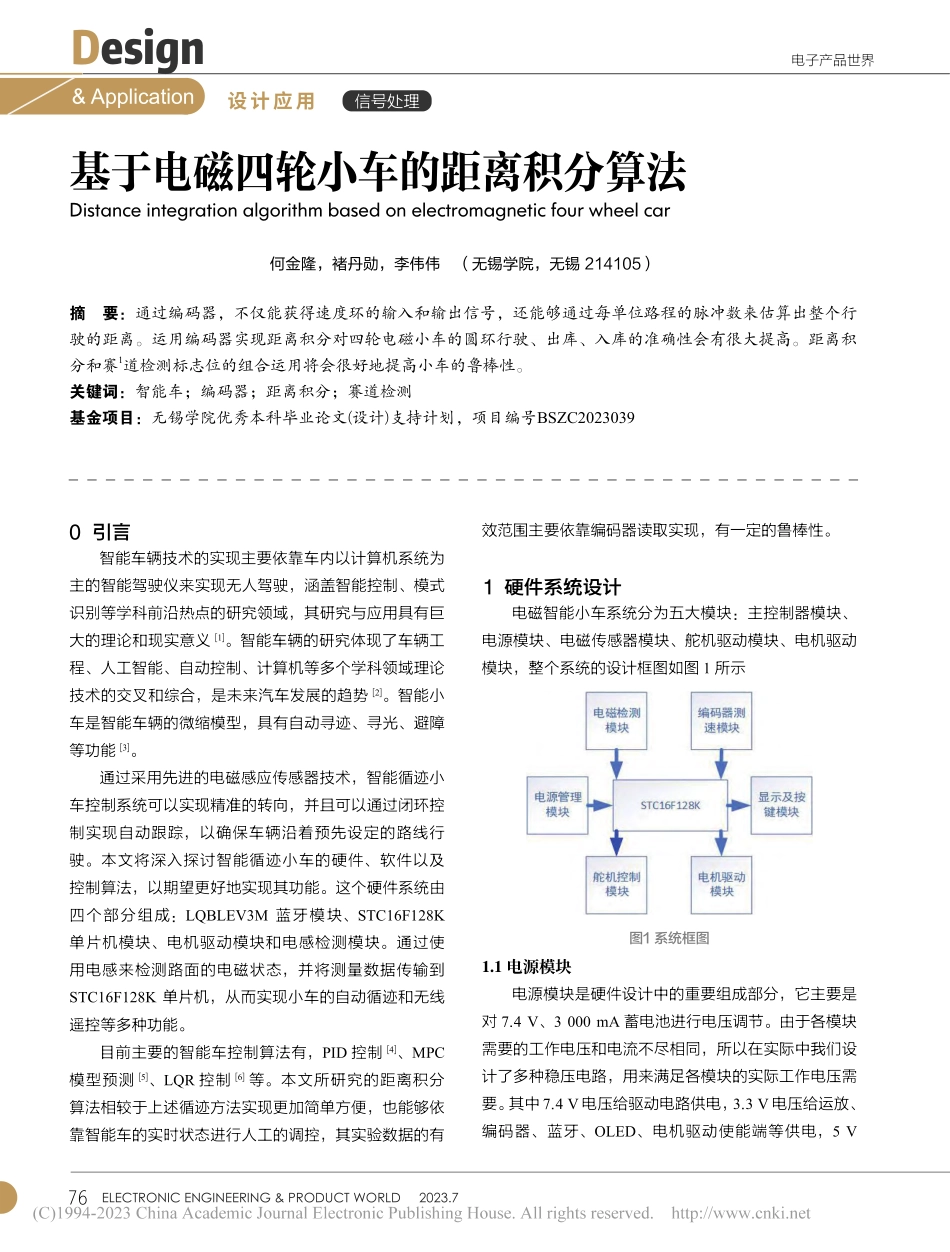
76ELECTRONICENGINEERING&PRODUCTWORLD2023.7$信号处理电子产品世界Design设计应用&Application基于电磁四轮小车的距离积分算法Distanceintegrationalgorithmbasedonelectromagneticfourwheelcar何金隆,褚丹勋,李伟伟(无锡学院,无锡214105)摘要:通过编码器,不仅能获得速度环的输入和输出信号,还能够通过每单位路程的脉冲数来估算出整个行驶的距离。运用编码器实现距离积分对四轮电磁小车的圆环行驶、出库、入库的准确性会有很大提高。距离积分和赛1道检测标志位的组合运用将会很好地提高小车的鲁棒性。关键词:智能车;编码器;距离积分;赛道检测基金项目:无锡学院优秀本科毕业论文(设计)支持计划,项目编号BSZC20230390引言智能车辆技术的实现主要依靠车内以计算机系统为主的智能驾驶仪来实现无人驾驶,涵盖智能控制、模式识别等学科前沿热点的研究领域,其研究与应用具有巨大的理论和现实意义[1]。智能车辆的研究体现了车辆工程、人工智能、自动控制、计算机等多个学科领域理论技术的交叉和综合,是未来汽车发展的趋势[2]。智能小车是智能车辆的微缩模型,具有自动寻迹、寻光、避障等功能[3]。通过采用先进的电磁感应传感器技术,智能循迹小车控制系统可以实现精准的转向,并且可以通过闭环控制实现自动跟踪,以确保车辆沿着预先设定的路线行驶。本文将深入探讨智能循迹小车的硬件、软件以及控制算法,以期望更好地实现其功能。这个硬件系统由四个部分组成:LQBLEV3M蓝牙模块、STC16F128K单片机模块、电机驱动模块和电感检测模块。通过使用电感来检测路面的电磁状态,并将测量数据传输到STC16F128K单片机,从而实现小车的自动循迹和无线遥控等多种功能。目前主要的智能车控制算法有,PID控制[4]、MPC模型预测[5]、LQR控制[6]等。本文所研究的距离积分算法相较于上述循迹方法实现更加简单方便,也能够依靠智能车的实时状态进行人工的调控,其实验数据的有效范围主要依靠编码器读取实现,有一定的鲁棒性。1硬件系统设计电磁智能小车系统分为五大模块:主控制器模块、电源模块、电磁传感器模块、舵机驱动模块、电机驱动模块,整个系统的设计框图如图1所示图1系统框图1.1电源模块电源模块是硬件设计中的重要组成部分,它主要是对7.4V、3000mA蓄电池进行电压调节。由于各模块需要的工作电压和电流不尽相同,所以在实际中我们设计了多种稳压电路,用来满足各模块的实际工作电压需要。其中7.4V电压给驱动电路供电,3.3V电压给运放、编码器、蓝牙、OLED、电机驱动...