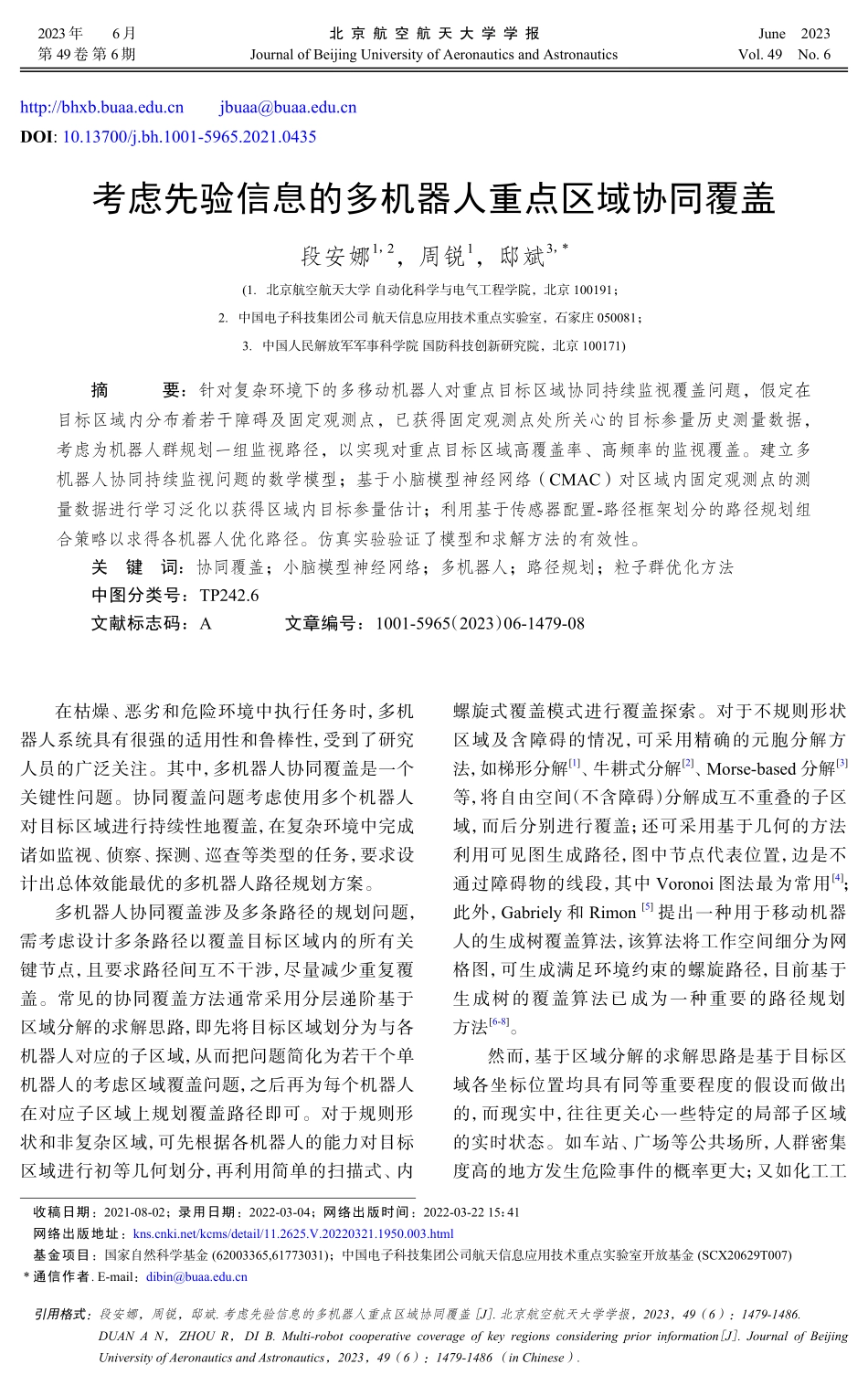
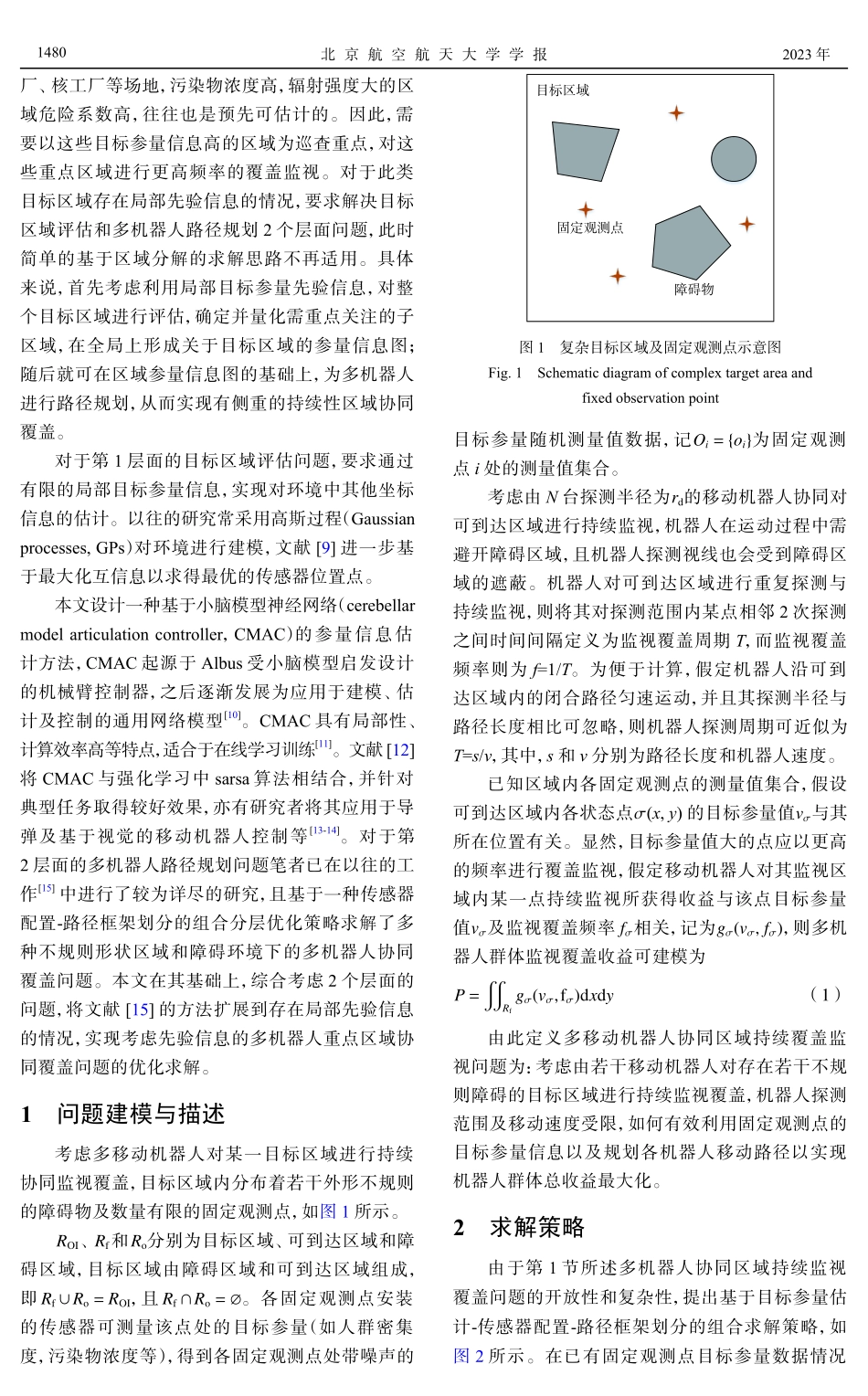
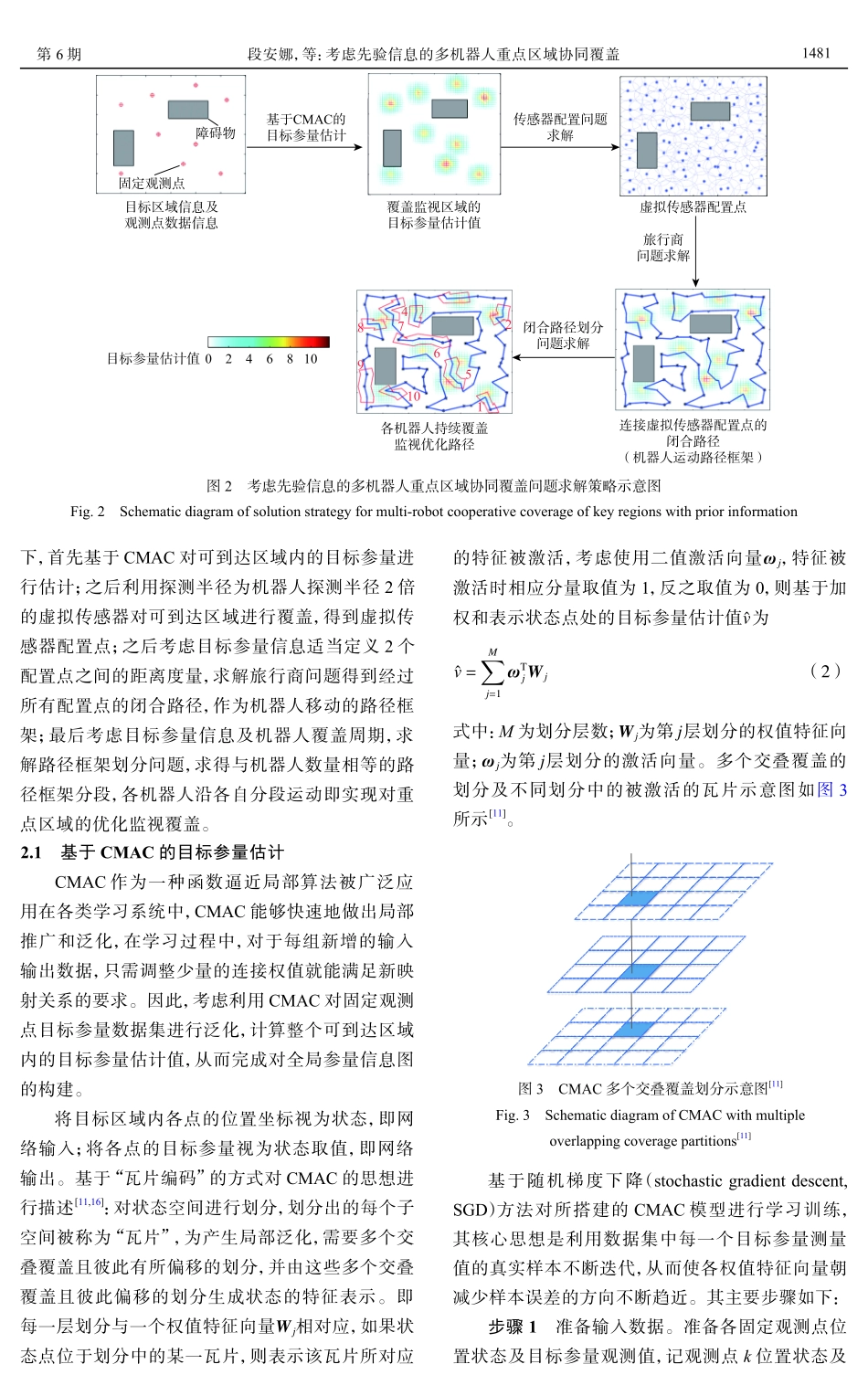
http://bhxb.buaa.edu.cnjbuaa@buaa.edu.cnDOI:10.13700/j.bh.1001-5965.2021.0435考虑先验信息的多机器人重点区域协同覆盖段安娜1,2,周锐1,邸斌3,*(1.北京航空航天大学自动化科学与电气工程学院,北京100191;2.中国电子科技集团公司航天信息应用技术重点实验室,石家庄050081;3.中国人民解放军军事科学院国防科技创新研究院,北京100171)摘要:针对复杂环境下的多移动机器人对重点目标区域协同持续监视覆盖问题,假定在目标区域内分布着若干障碍及固定观测点,已获得固定观测点处所关心的目标参量历史测量数据,考虑为机器人群规划一组监视路径,以实现对重点目标区域高覆盖率、高频率的监视覆盖。建立多机器人协同持续监视问题的数学模型;基于小脑模型神经网络(CMAC)对区域内固定观测点的测量数据进行学习泛化以获得区域内目标参量估计;利用基于传感器配置-路径框架划分的路径规划组合策略以求得各机器人优化路径。仿真实验验证了模型和求解方法的有效性。关键词:协同覆盖;小脑模型神经网络;多机器人;路径规划;粒子群优化方法中图分类号:TP242.6文献标志码:A文章编号:1001-5965(2023)06-1479-08在枯燥、恶劣和危险环境中执行任务时,多机器人系统具有很强的适用性和鲁棒性,受到了研究人员的广泛关注。其中,多机器人协同覆盖是一个关键性问题。协同覆盖问题考虑使用多个机器人对目标区域进行持续性地覆盖,在复杂环境中完成诸如监视、侦察、探测、巡查等类型的任务,要求设计出总体效能最优的多机器人路径规划方案。多机器人协同覆盖涉及多条路径的规划问题,需考虑设计多条路径以覆盖目标区域内的所有关键节点,且要求路径间互不干涉,尽量减少重复覆盖。常见的协同覆盖方法通常采用分层递阶基于区域分解的求解思路,即先将目标区域划分为与各机器人对应的子区域,从而把问题简化为若干个单机器人的考虑区域覆盖问题,之后再为每个机器人在对应子区域上规划覆盖路径即可。对于规则形状和非复杂区域,可先根据各机器人的能力对目标区域进行初等几何划分,再利用简单的扫描式、内螺旋式覆盖模式进行覆盖探索。对于不规则形状区域及含障碍的情况,可采用精确的元胞分解方法,如梯形分解[1]、牛耕式分解[2]、Morse-based分解[3]等,将自由空间(不含障碍)分解成互不重叠的子区域,而后分别进行覆盖;还可采用基于几何的方法利用可见图生成路径,图中节点代表位置,边是不通过障碍物的线段,其中Voronoi图法最为常用[4];此外...