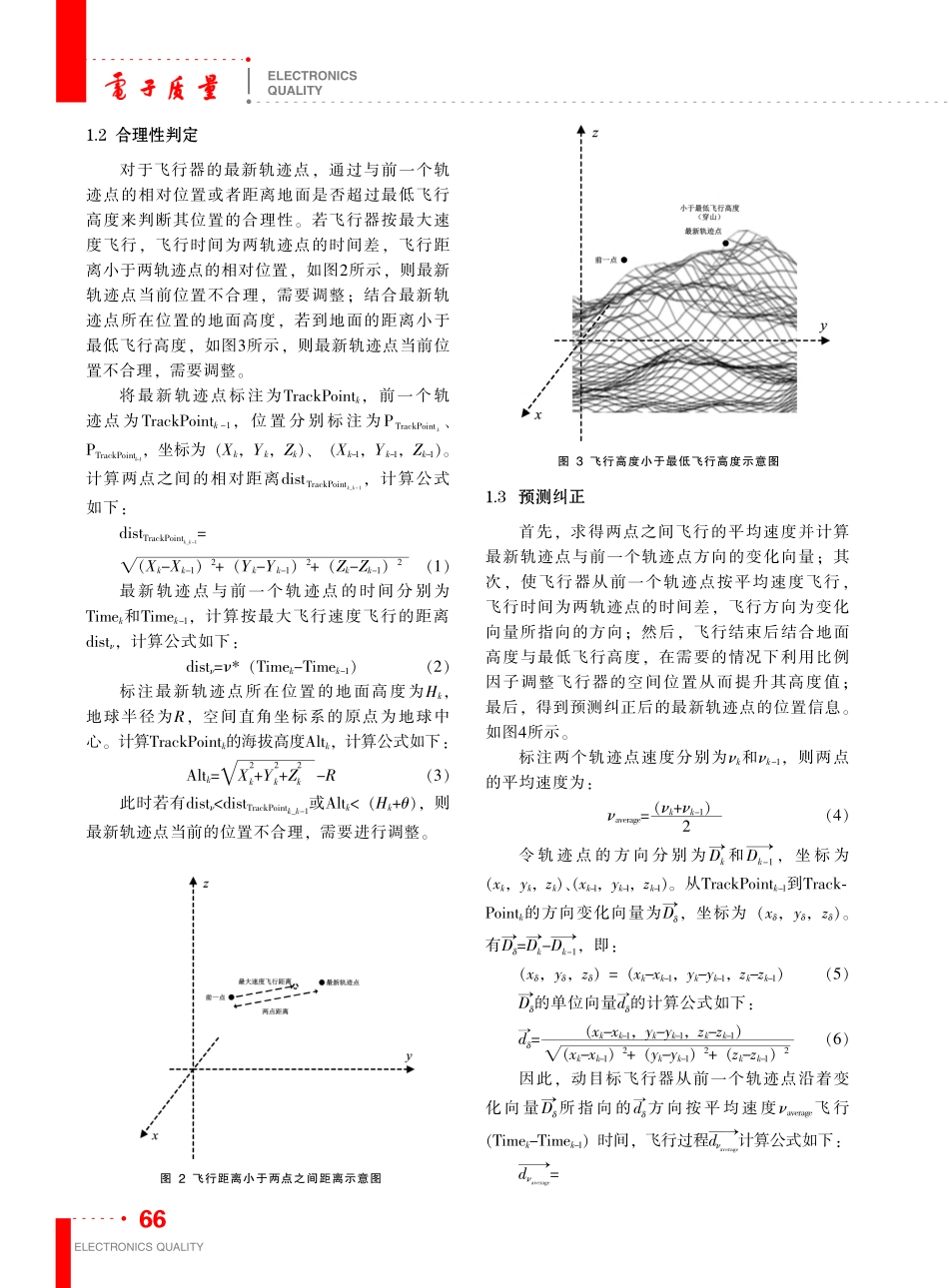
ELECTRONICSQUALITYELECTRONICSQUALITY基于前点信息预测纠正动目标轨迹的方法刘辰炜,张臻(中国电子科技集团公司第二十八研究所,江苏南京210007)摘要:针对民用仿真软件中,动目标飞行器轨迹点错误导致飞行时出现撞山、偏离整体轨迹方向的问题,提出了一种基于前点信息预测纠正动目标轨迹的方法。基于飞行器的最低飞行高度和最大飞行速度,根据飞行器最新轨迹点与前一个轨迹点来判断其位置是否合理,不合理则根据实时速度、航向和两点之间的时间差等参数计算得到测纠正后的最新轨迹点。实验结果表明针对民用飞行器利用该方法,能够纠正预测得到较为合理的、符合整体飞行轨迹的轨迹点。关键词:仿真软件;轨迹点;动目标;预测纠正中国分类号:TP183文献标识码:A文章编号:1003-0107(2023)06-0064-04doi:10.3969/j.issn.1003-0107.2023.06.015AMethodofPredictingandRedressingMovingTargetTrajectoryBasedontheInformationofPreviousPointLIUChenwei,ZHANGZhen(The28thResearchInstituteofChinaElectronicsTechnologyGroupCorporation,Nanjing210007,China)Abstract:Aimingattheproblemofmountaincollisonanddeviationfromtheoveralltrajectorydirectioncausedbytheerrorofthetrajectorypointofthemovingtargetaircraftincivilsimulationsoftware,amethodofpredictingandcorrect-ingthetrajectoryofthemovingtargetbasedontheinformationofthepreviouspointisproposed.Basedonthelowestflightaltitudeandmaximumflightspeedoftheaircraft,whetherthepositionoftheaircraftisreasonableisjudgedac-cordingtoitslatesttrajectorypointandprevioustrajectorypoint.Ifitisnotreasonable,thelatesttrajectorypointaftermeasurementandcorrectioniscalculatedaccordingtoreal-timespeed,heading,timedifferencebetweentwopointsandotherparameters.Theexperimentalresultsshowthatthepredicationcanbecorrectedandthetrajectorypointsthatarereasonableandconsitentwiththeoverallflighttrajectoryforcivilaircraftcanbeobtainedthroughthemethod.Keywords:simulationsoftware;trajectorypoint;movingtarget;predictionandredressal收稿日期:2022-12-01作者简介:刘辰炜(1987—),男,江苏南京人,中国电子科技集团公司第二十八研究所高级工程师,硕士,从事地理信息系统研究工作。通讯作者:张臻(1982—),男,江苏南京人,中...