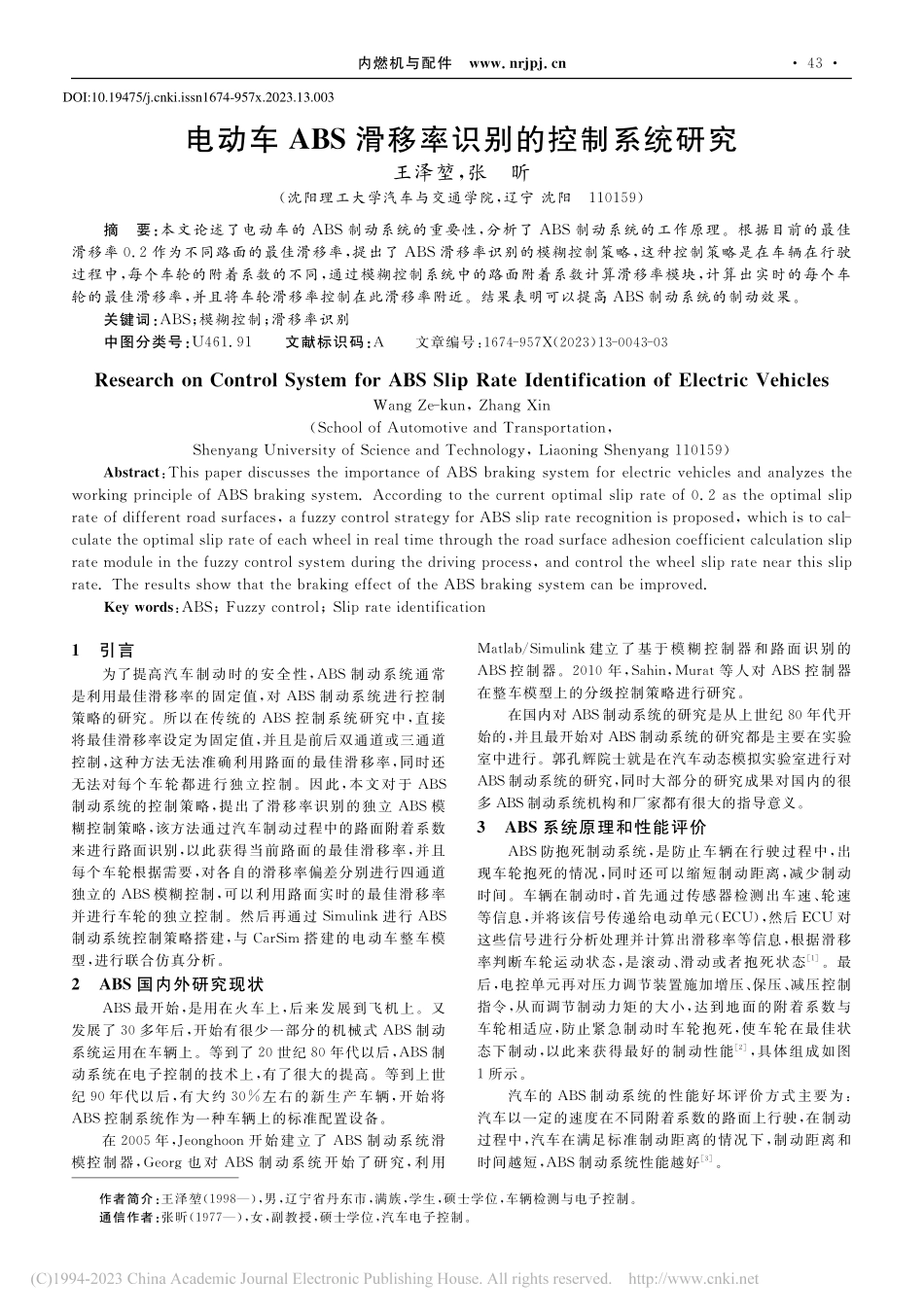
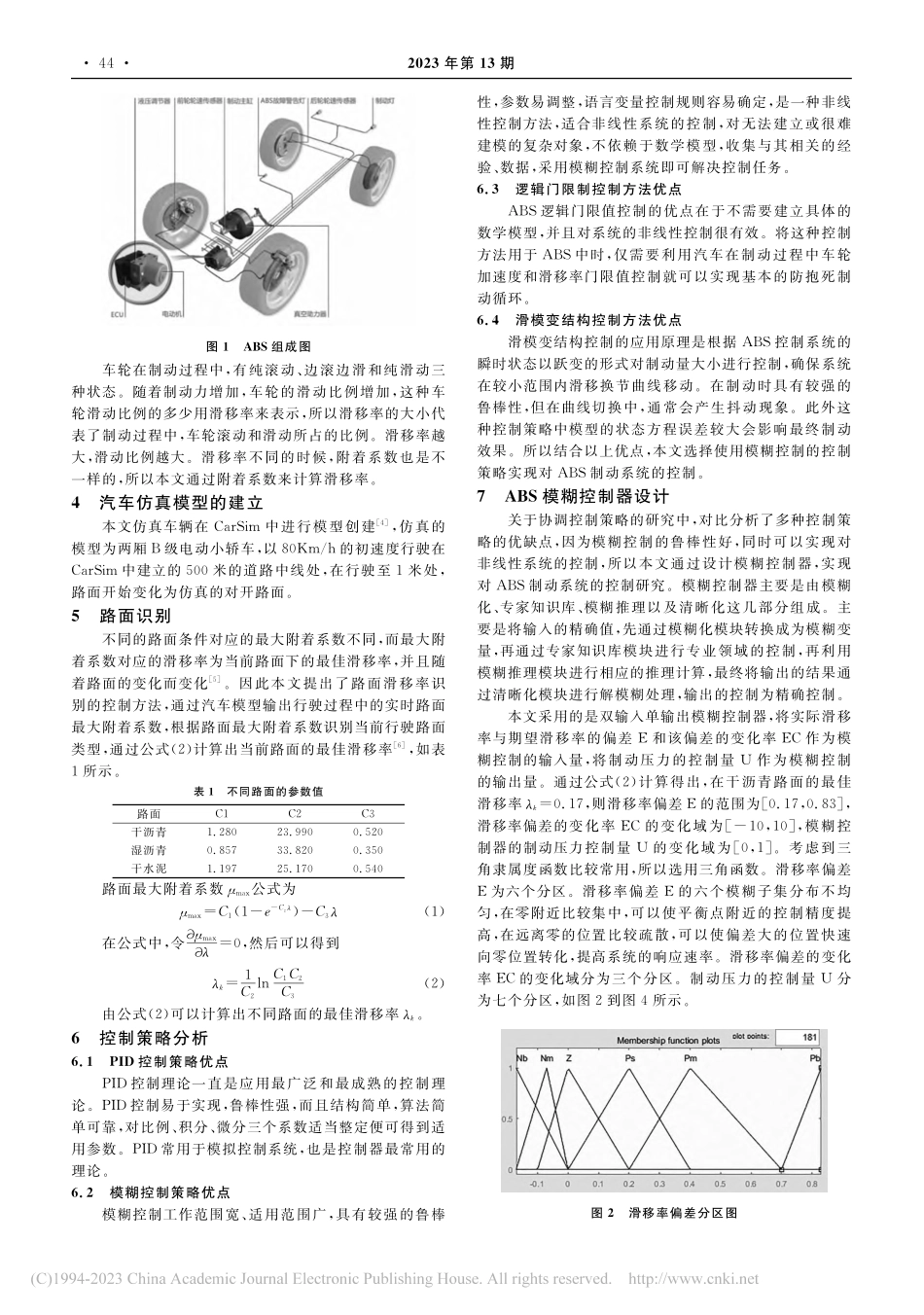
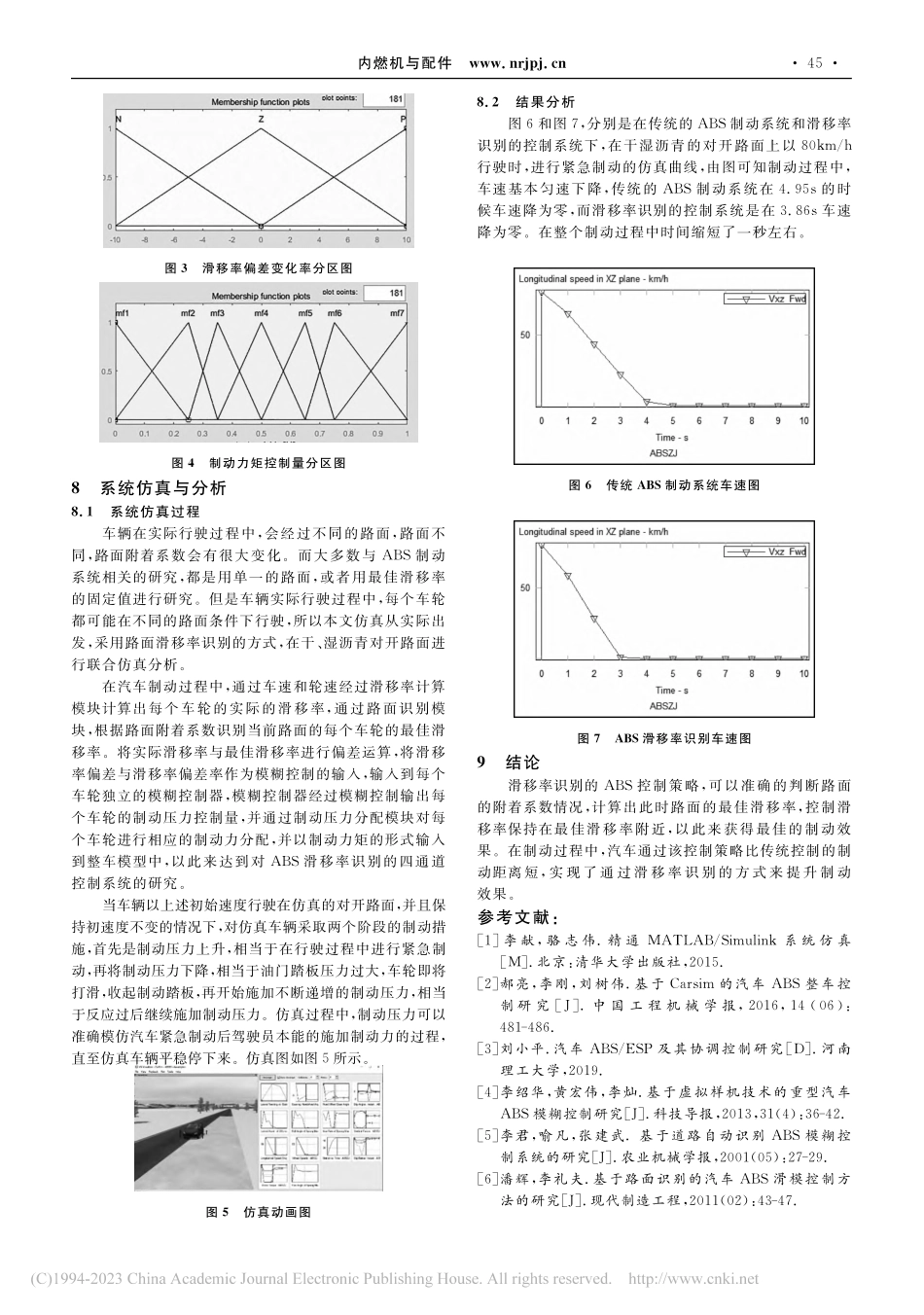
内燃机与配件www.nrjpj.cn电动车ABS滑移率识别的控制系统研究王泽堃,张昕(沈阳理工大学汽车与交通学院,辽宁沈阳110159)摘要:本文论述了电动车的ABS制动系统的重要性,分析了ABS制动系统的工作原理。根据目前的最佳滑移率0.2作为不同路面的最佳滑移率,提出了ABS滑移率识别的模糊控制策略,这种控制策略是在车辆在行驶过程中,每个车轮的附着系数的不同,通过模糊控制系统中的路面附着系数计算滑移率模块,计算出实时的每个车轮的最佳滑移率,并且将车轮滑移率控制在此滑移率附近。结果表明可以提高ABS制动系统的制动效果。关键词:ABS;模糊控制;滑移率识别中图分类号:U461.91文献标识码:A文章编号:1674-957X(2023)13-0043-03ResearchonControlSystemforABSSlipRateIdentificationofElectricVehiclesWangZe-kun,ZhangXin(SchoolofAutomotiveandTransportation,ShenyangUniversityofScienceandTechnology,LiaoningShenyang110159)Abstract:ThispaperdiscussestheimportanceofABSbrakingsystemforelectricvehiclesandanalyzestheworkingprincipleofABSbrakingsystem.Accordingtothecurrentoptimalsliprateof0.2astheoptimalsliprateofdifferentroadsurfaces,afuzzycontrolstrategyforABSslipraterecognitionisproposed,whichistocal-culatetheoptimalsliprateofeachwheelinrealtimethroughtheroadsurfaceadhesioncoefficientcalculationslipratemoduleinthefuzzycontrolsystemduringthedrivingprocess,andcontrolthewheelslipratenearthisslipra...