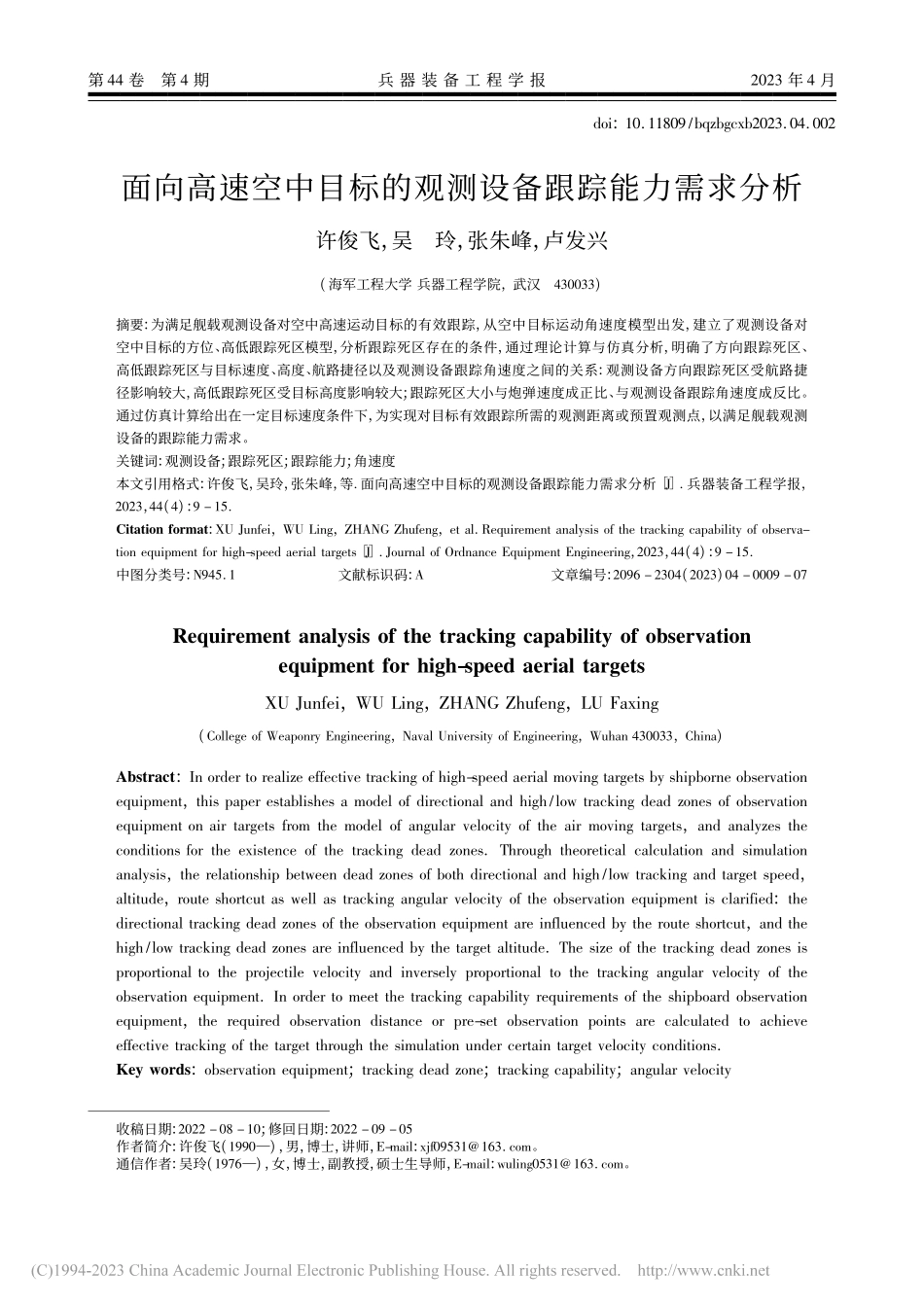
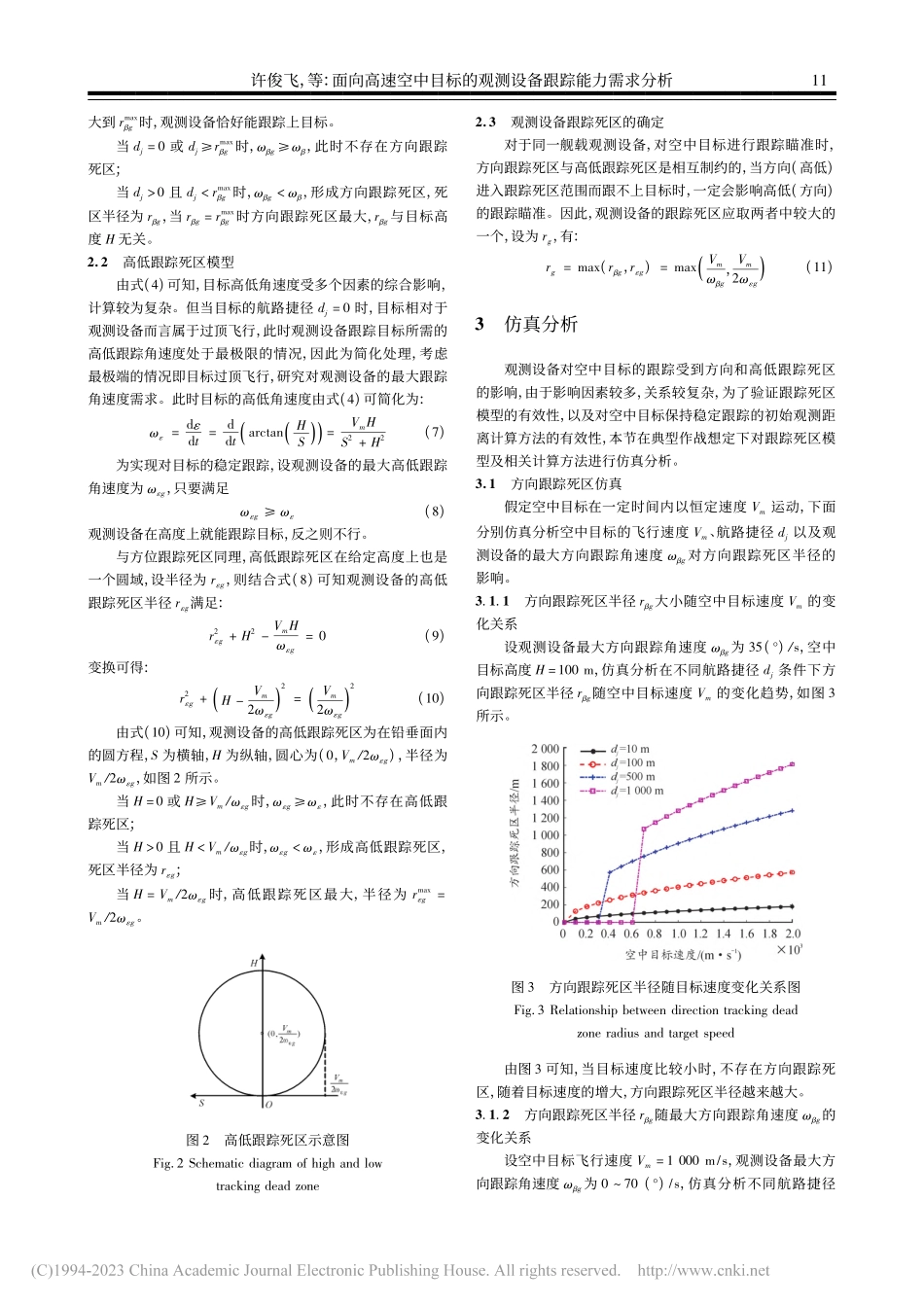
第44卷第4期兵器装备工程学报2023年4■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■■月收稿日期:2022-08-10;修回日期:2022-09-05作者简介:许俊飞(1990—),男,博士,讲师,E-mail:xjf09531@163.com。通信作者:吴玲(1976—),女,博士,副教授,硕士生导师,E-mail:wuling0531@163.com。doi:10.11809/bqzbgcxb2023.04.002面向高速空中目标的观测设备跟踪能力需求分析许俊飞,吴玲,张朱峰,卢发兴(海军工程大学兵器工程学院,武汉430033)摘要:为满足舰载观测设备对空中高速运动目标的有效跟踪,从空中目标运动角速度模型出发,建立了观测设备对空中目标的方位、高低跟踪死区模型,分析跟踪死区存在的条件,通过理论计算与仿真分析,明确了方向跟踪死区、高低跟踪死区与目标速度、高度、航路捷径以及观测设备跟踪角速度之间的关系:观测设备方向跟踪死区受航路捷径影响较大,高低跟踪死区受目标高度影响较大;跟踪死区大小与炮弹速度成正比、与观测设备跟踪角速度成反比。通过仿真计算给出在一定目标速度条件下,为实现对目标有效跟踪所需的观测距离或预置观测点,以满足舰载观测设备的跟踪能力需求。关键词:观测设备;跟踪死区;跟踪能力;角速度本文引用格式:许俊飞,吴玲,张朱峰,等.面向高速空中目标的观测设备跟踪能力需求分析[J].兵器装备工程学报,2023,44(4):9-15.Citationformat:XUJunfei,WULing,ZHANGZhufeng,etal.Requirementanalysisofthetrackingcapabilityofobserva-tionequipmentforhigh-speedaerialtargets[J].JournalofOrdnanceEquipmentEngineering,2023,44(4):9-15.中图分类号:N945.1文献标识码:A文章编号:2096-2304(2023)04-0009-07Requirementanalysisofthetrackingcapabilityofobservationequipmentforhigh-speedaerialtargetsXUJunfei,WULing,ZHANGZhufeng,LUFaxing(CollegeofWeaponryEngineering,NavalUniversityofEngineering,Wuhan430033,China)Abstract:Inordertorealizeeffectivetrackingofhigh-speedaerialmovingtargetsbyshipborneobservationequipment,thispaperestablishesamodelofdirectionalandhigh/lowtrackingdeadzonesofobservationequipmentonairtargetsfromthemodelofangularvelocityoftheairmovingtargets,andanalyzestheconditionsfortheexistenceofthetrackingdeadzones.Throughtheoreticalcalculationandsimul...