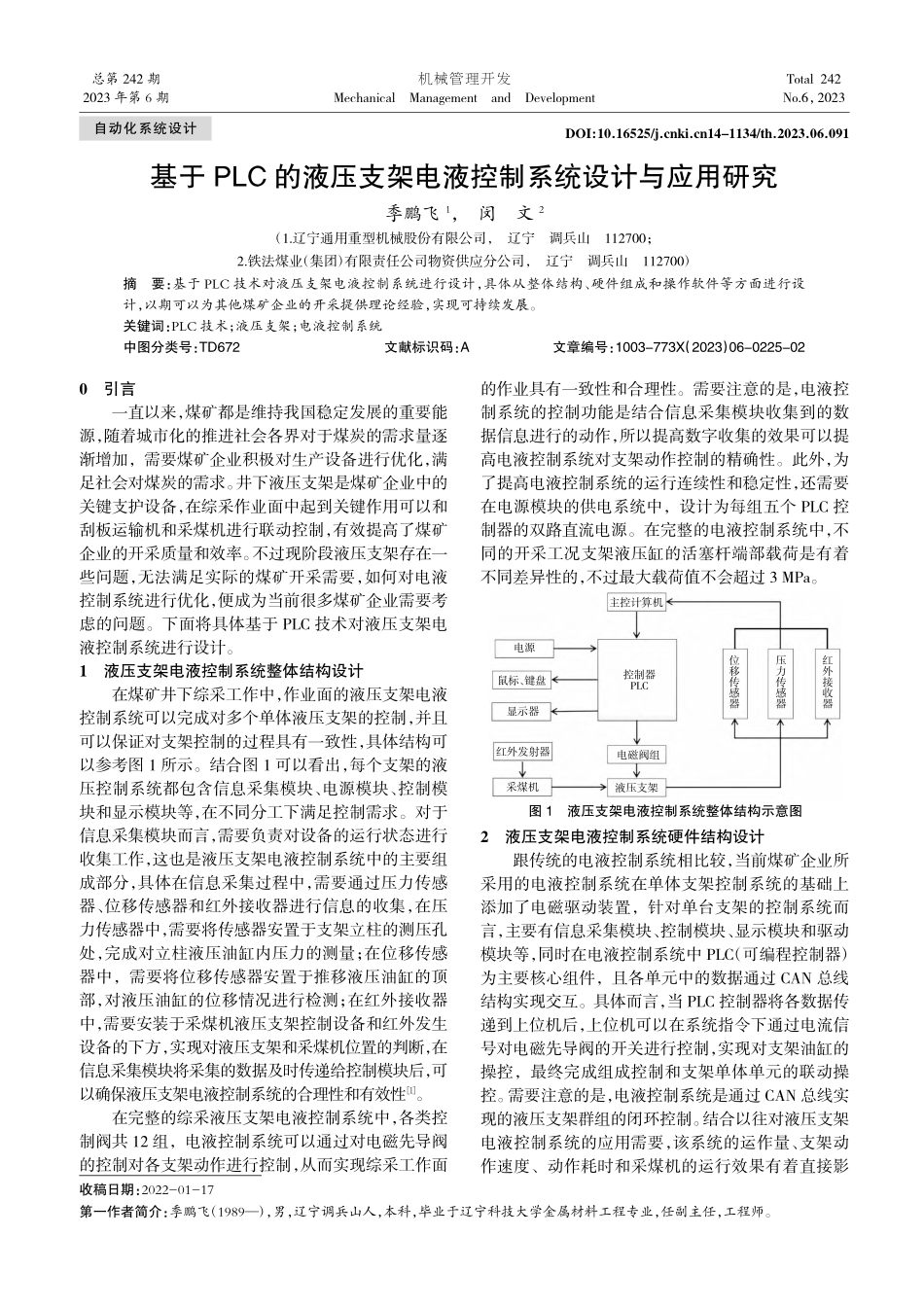
基于PLC的液压支架电液控制系统设计与应用研究季鹏飞1,闵文2(1.辽宁通用重型机械股份有限公司,辽宁调兵山112700;2.铁法煤业(集团)有限责任公司物资供应分公司,辽宁调兵山112700)摘要:基于PLC技术对液压支架电液控制系统进行设计,具体从整体结构、硬件组成和操作软件等方面进行设计,以期可以为其他煤矿企业的开采提供理论经验,实现可持续发展。关键词:PLC技术;液压支架;电液控制系统中图分类号:TD672文献标识码:A文章编号:1003-773X(2023)06-0225-020引言一直以来,煤矿都是维持我国稳定发展的重要能源,随着城市化的推进社会各界对于煤炭的需求量逐渐增加,需要煤矿企业积极对生产设备进行优化,满足社会对煤炭的需求。井下液压支架是煤矿企业中的关键支护设备,在综采作业面中起到关键作用可以和刮板运输机和采煤机进行联动控制,有效提高了煤矿企业的开采质量和效率。不过现阶段液压支架存在一些问题,无法满足实际的煤矿开采需要,如何对电液控制系统进行优化,便成为当前很多煤矿企业需要考虑的问题。下面将具体基于PLC技术对液压支架电液控制系统进行设计。1液压支架电液控制系统整体结构设计在煤矿井下综采工作中,作业面的液压支架电液控制系统可以完成对多个单体液压支架的控制,并且可以保证对支架控制的过程具有一致性,具体结构可以参考图1所示。结合图1可以看出,每个支架的液压控制系统都包含信息采集模块、电源模块、控制模块和显示模块等,在不同分工下满足控制需求。对于信息采集模块而言,需要负责对设备的运行状态进行收集工作,这也是液压支架电液控制系统中的主要组成部分,具体在信息采集过程中,需要通过压力传感器、位移传感器和红外接收器进行信息的收集,在压力传感器中,需要将传感器安置于支架立柱的测压孔处,完成对立柱液压油缸内压力的测量;在位移传感器中,需要将位移传感器安置于推移液压油缸的顶部,对液压油缸的位移情况进行检测;在红外接收器中,需要安装于采煤机液压支架控制设备和红外发生设备的下方,实现对液压支架和采煤机位置的判断,在信息采集模块将采集的数据及时传递给控制模块后,可以确保液压支架电液控制系统的合理性和有效性[1]。在完整的综采液压支架电液控制系统中,各类控制阀共12组,电液控制系统可以通过对电磁先导阀的控制对各支架动作进行控制,从而实现综采工作面的作业具有一致性和合理性。需要注意的是,电液控制系统的控制功能是结合信息采集模块收集到的数据...