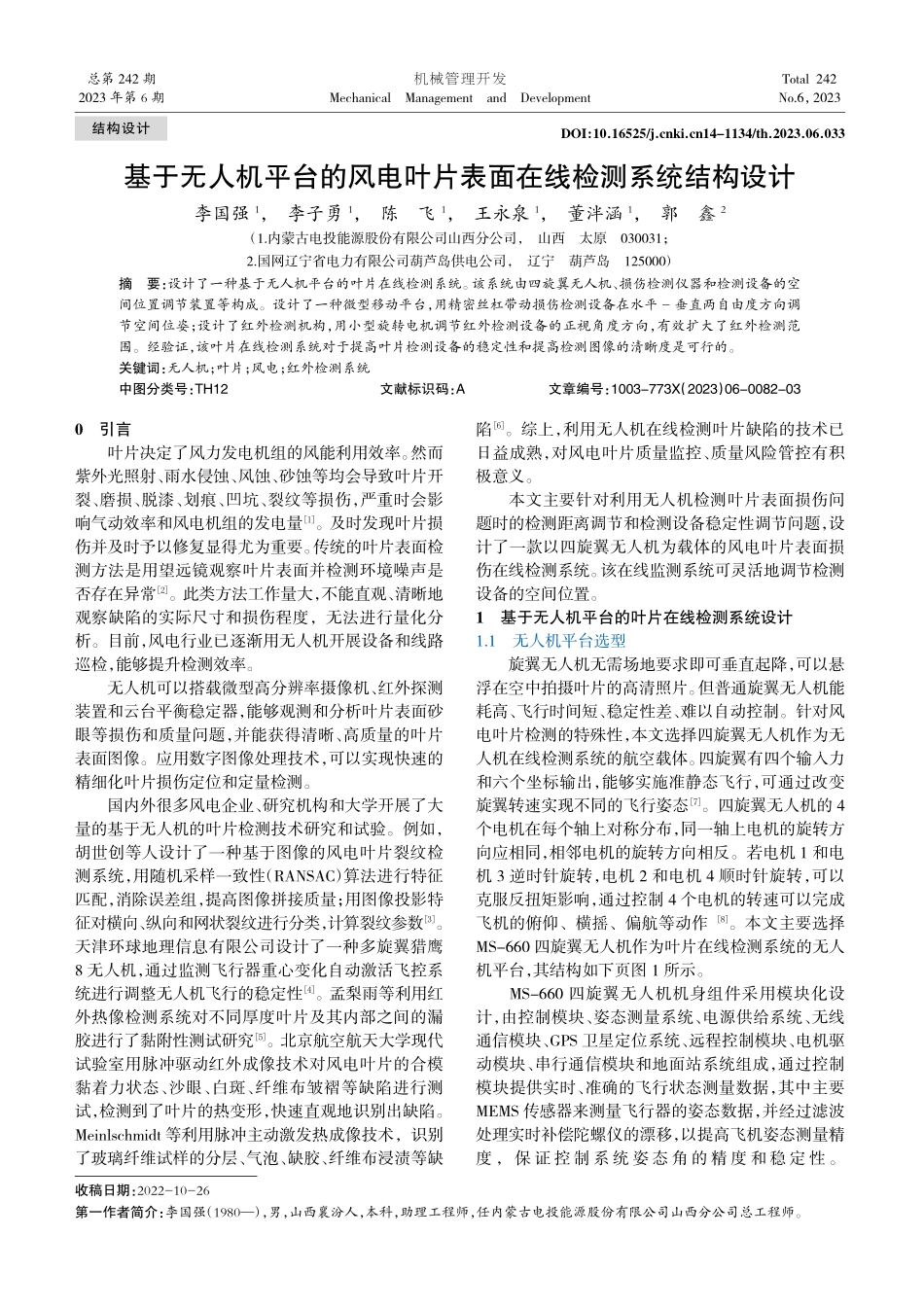
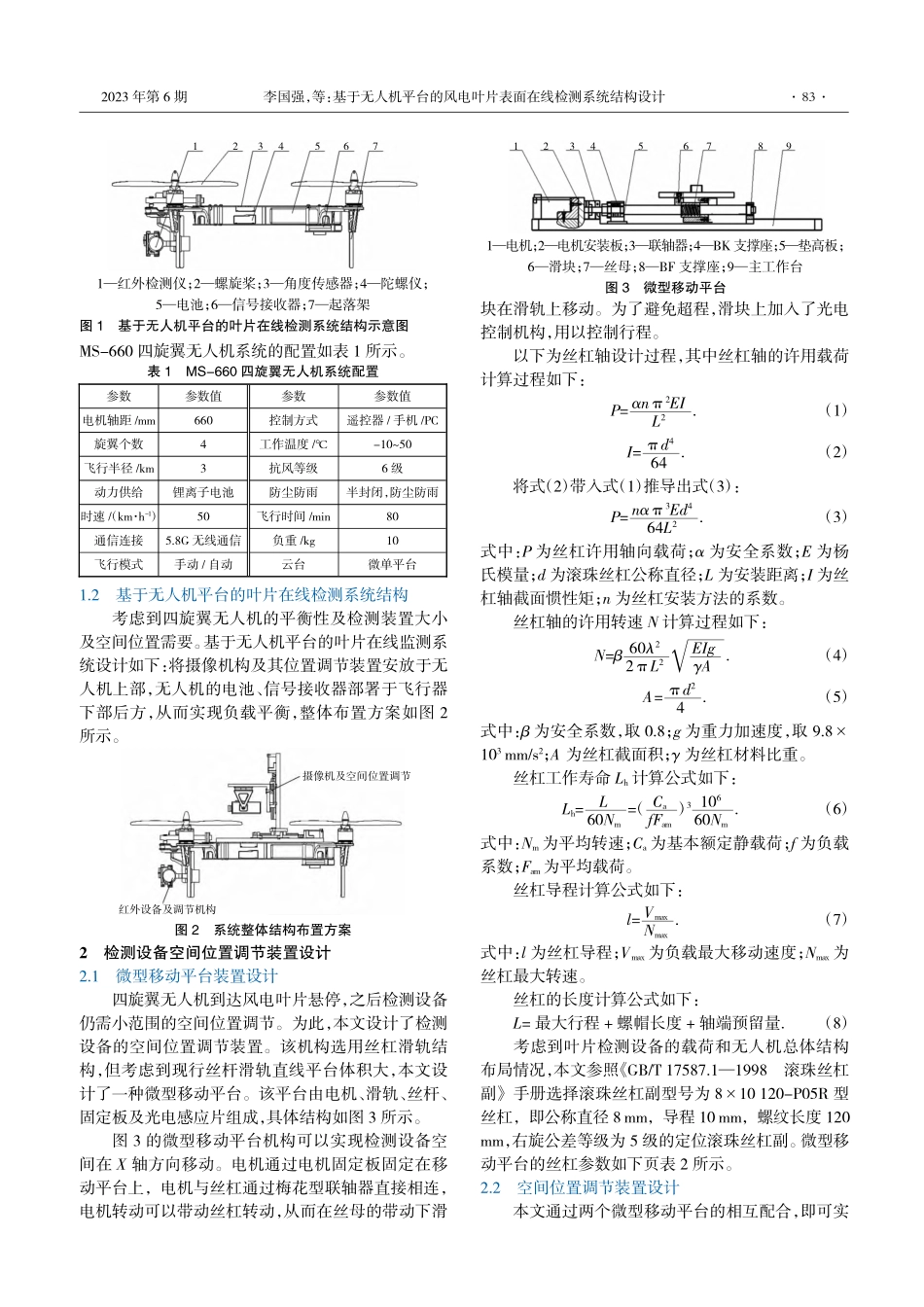
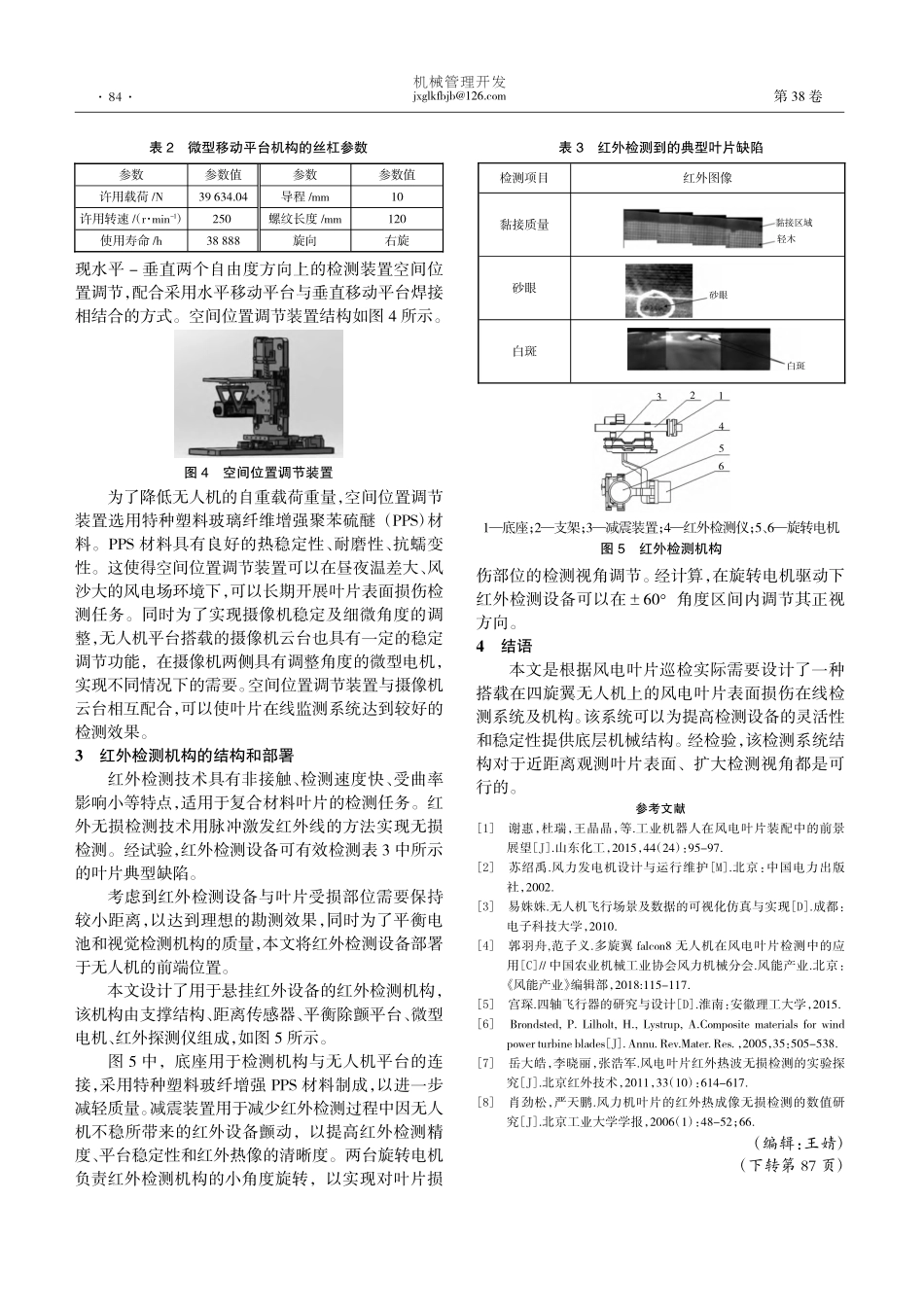
基于无人机平台的风电叶片表面在线检测系统结构设计李国强1,李子勇1,陈飞1,王永泉1,董泮涵1,郭鑫2(1.内蒙古电投能源股份有限公司山西分公司,山西太原030031;2.国网辽宁省电力有限公司葫芦岛供电公司,辽宁葫芦岛125000)摘要:设计了一种基于无人机平台的叶片在线检测系统。该系统由四旋翼无人机、损伤检测仪器和检测设备的空间位置调节装置等构成。设计了一种微型移动平台,用精密丝杠带动损伤检测设备在水平-垂直两自由度方向调节空间位姿;设计了红外检测机构,用小型旋转电机调节红外检测设备的正视角度方向,有效扩大了红外检测范围。经验证,该叶片在线检测系统对于提高叶片检测设备的稳定性和提高检测图像的清晰度是可行的。关键词:无人机;叶片;风电;红外检测系统中图分类号:TH12文献标识码:A文章编号:1003-773X(2023)06-0082-030引言叶片决定了风力发电机组的风能利用效率。然而紫外光照射、雨水侵蚀、风蚀、砂蚀等均会导致叶片开裂、磨损、脱漆、划痕、凹坑、裂纹等损伤,严重时会影响气动效率和风电机组的发电量[1]。及时发现叶片损伤并及时予以修复显得尤为重要。传统的叶片表面检测方法是用望远镜观察叶片表面并检测环境噪声是否存在异常[2]。此类方法工作量大,不能直观、清晰地观察缺陷的实际尺寸和损伤程度,无法进行量化分析。目前,风电行业已逐渐用无人机开展设备和线路巡检,能够提升检测效率。无人机可以搭载微型高分辨率摄像机、红外探测装置和云台平衡稳定器,能够观测和分析叶片表面砂眼等损伤和质量问题,并能获得清晰、高质量的叶片表面图像。应用数字图像处理技术,可以实现快速的精细化叶片损伤定位和定量检测。国内外很多风电企业、研究机构和大学开展了大量的基于无人机的叶片检测技术研究和试验。例如,胡世创等人设计了一种基于图像的风电叶片裂纹检测系统,用随机采样一致性(RANSAC)算法进行特征匹配,消除误差组,提高图像拼接质量;用图像投影特征对横向、纵向和网状裂纹进行分类,计算裂纹参数[3]。天津环球地理信息有限公司设计了一种多旋翼猎鹰8无人机,通过监测飞行器重心变化自动激活飞控系统进行调整无人机飞行的稳定性[4]。孟梨雨等利用红外热像检测系统对不同厚度叶片及其内部之间的漏胶进行了黏附性测试研究[5]。北京航空航天大学现代试验室用脉冲驱动红外成像技术对风电叶片的合模黏着力状态、沙眼、白斑、纤维布皱褶等缺陷进行测试,检测到了叶片的热变形,快速直观地识别出缺陷...