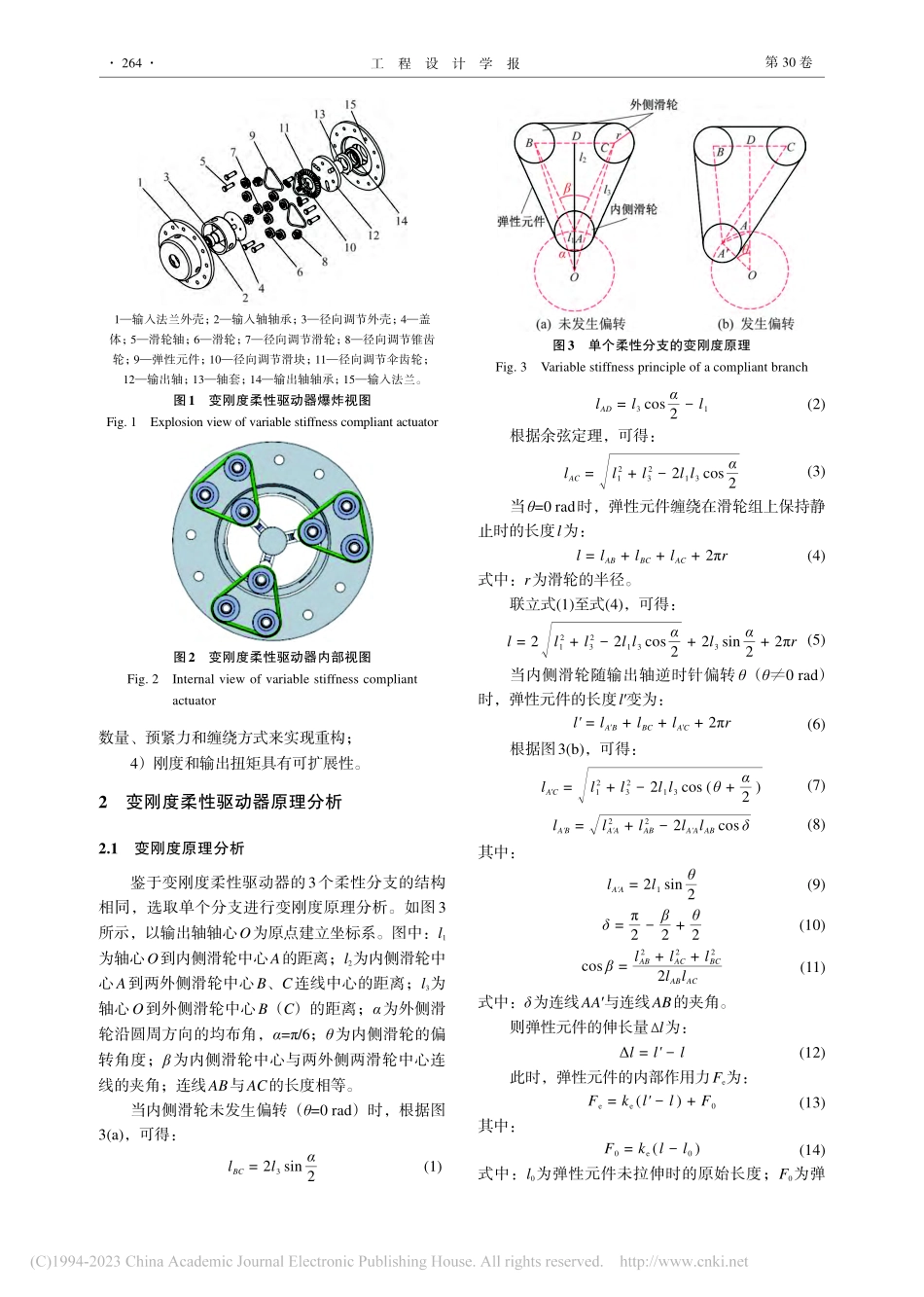
第30卷第2期2023年4月工程设计学报ChineseJournalofEngineeringDesignVol.30No.2Apr.2023可重构变刚度柔性驱动器的设计与性能分析段韦婕1,秦慧斌1,刘荣1,李中一2,白绍平3(1.中北大学机械工程学院,山西太原030051;2.北京航空航天大学杭州创新研究院,浙江杭州310051;3.奥尔堡大学材料与制造系,北日德兰奥尔堡9220)摘要:柔性驱动器因其固有的柔顺特性,能够实现机器人与人之间的安全交互,且具有较强的环境适应能力。为满足外骨骼机器人对关节柔性及变刚度特性的要求,设计了一种具有可重构性的变刚度柔性驱动器,可通过改变弹性元件的几何参数、材料和数量来实现重构,通过径向调节预紧力来实现可调范围内的变刚度。首先,运用零长度机架四杆机构的传动原理,建立了变刚度柔性驱动器的刚度数学模型,分析了柔性分支数和弹性元件刚度、预紧力对驱动器输出扭矩和刚度的影响规律。然后,建立了驱动器的ADAMS虚拟样机模型,并开展静力学性能仿真分析,验证了刚度数学模型的正确性。最后,建立了驱动器的动力学模型,通过Laplace变换得到了动力学系统的传递函数。频率特性分析结果表明,该柔性驱动器的稳定性良好。所设计的柔性驱动器体积小且质量小,能够在可穿戴外骨骼机器人驱动机构中应用。研究结果为机器人柔性驱动关节的设计提供了理论和技术参考。关键词:柔性驱动器;可重构;变刚度;动力学模型中图分类号:TH122;TP242文献标志码:A文章编号:1006-754X(2023)02-0262-09DesignandperformanceanalysisofreconfigurablevariablestiffnesscompliantactuatorDUANWeijie1,QINHuibin1,LIURong1,LIZhongyi2,BAIShaoping3(1.SchoolofMechanicalEngineering,NorthUniversityofChina,Taiyuan030051,China;2.HangzhouInnovationInstitute,BeihangUniversity,Hangzhou310051,China;3.DepartmentofMaterialsandProduction,AalborgUniversity,Aalborg9220,Denmark)Abstract:Compliantactuatorscanachievesafeinteractionbetweenrobotsandhumansduetotheirinherentflexibility,andhavestrongenvironmentaladaptability.Tomeettherequirementsofexoskeletonrobotsforjointflexibilityandvariablestiffnesscharacteristics,areconfigurablevariablestiffnesscompliantactuatorwasdesigned,whichcouldachievereconstructionbychangingthegeometricparameters,materialsandquantityofelasticcomponents,andachievevariablestiffnesswithinanadjusta...