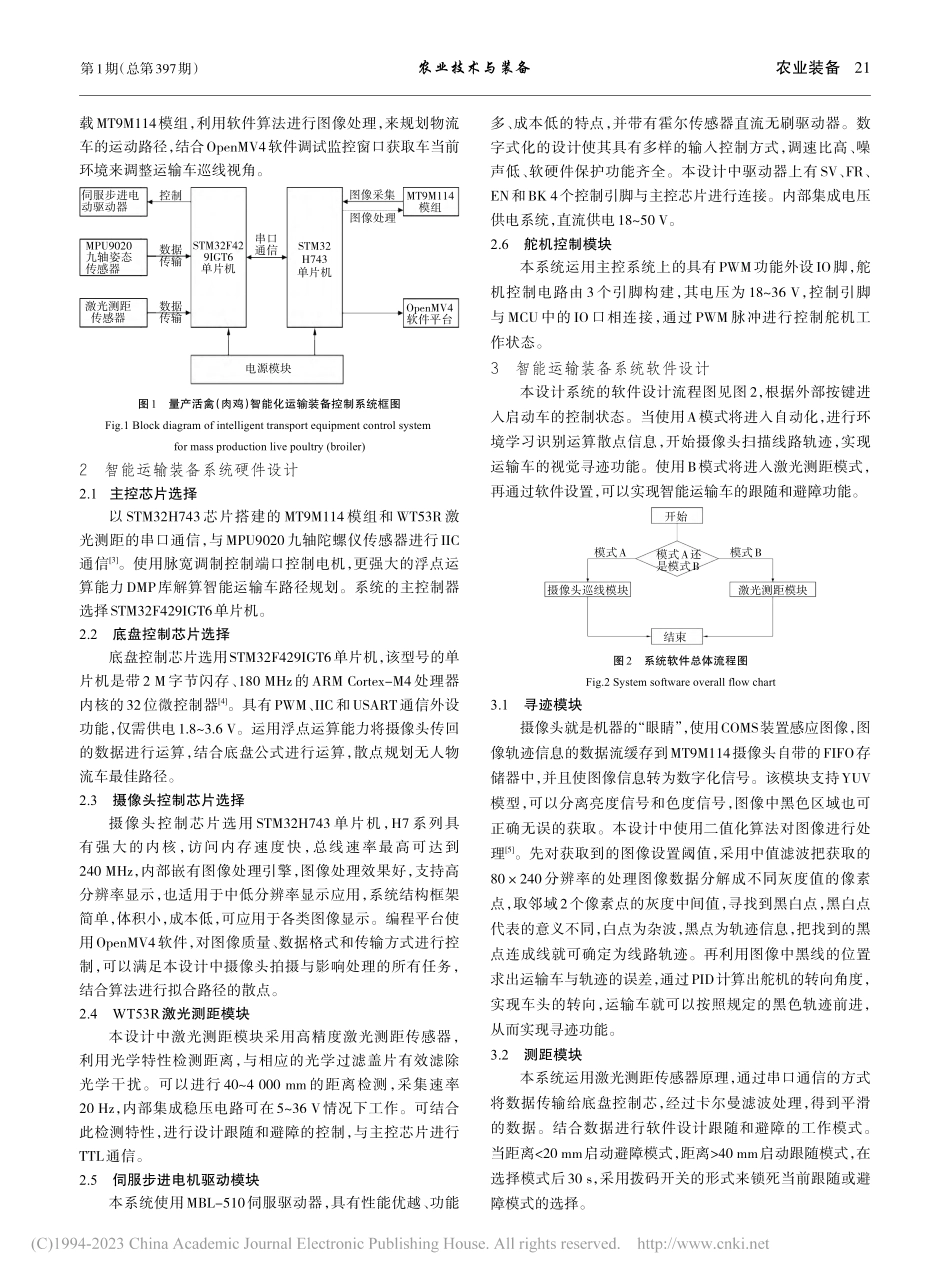
文章编号:1673-887X(2023)01-0020-03量产活禽(肉鸡)智能化运输装备控制系统的设计韩海豹,化荣,张虎,陈杰(晋中信息学院,山西太谷030800)摘要肉鸡养殖产业正向着规模化、集约化的方向发展,为减少活禽运输的应激反应,设计了一款智能化运输车。本设计基于STM32F429IGT6嵌入式微处理器的智能化底盘和基于STM32H743嵌入式微处理器的图像识别智能运输车。通过摄像头进行信息采集和模型的学习,运用OpenMV4软件调试监控窗口,搭载MT9M114模组摄像头,可对路径进行规划,同时,运用WT53R的激光测距避障和跟随技术避免运输车行驶过程中发生碰撞。实际的调试和运行结果表明,智能运输车能较好地执行视觉巡线和激光测距避障、跟随任务。关键词嵌入式;视觉路径规划;避障;跟随中图分类号S233.5文献标志码Adoi:10.3969/j.issn.1673-887X.2023.01.006DesignofIntelligentTransportationEquipmentControlSystemforMassProductionLivePoultry(Broiler)HanHaibao,HuaRong,ZhangHu,ChenJie(JinzhongCollegeofInformation,Taigu030801,Shanxi,China)AbstractAbstract:Broilerbreedingindustryisdevelopingtowardsthedirectionofscaleandintensification.Inordertoreducethestressreac‐tionoflivepoultrytransportation,akindofintelligenttransportvehicleisdesigned.ThisdesignisbasedonSTM32F429IGT6em‐beddedmicroprocessorintelligentchassisandSTM32H743embeddedmicroprocessorbasedimagerecognitionintelligenttransportvehicle.Throughthecameraforinformationcollectionandmodellearning,usingOpenMV4softwaredebuggingmonitoringwin‐dow,carryingMT9M114modulecamera,canplanthepath,atthesametime,WT53Rlaserrangingobstacleavoidanceandtrackingtechnologyisusedtoavoidthecollisionoftransportvehicles.Thepracticaldebuggingandrunningresultsshowedthattheintelligentvehiclecanperformthetasksofvisuallinepatrol,laserranging,obstacleavoidanceandfollowingwell.Keywords:flushbonading,visualpathplanning,obstacleavoidance,following规模化肉鸡养殖中肉鸡的群体数量较大、密度相对较高,饲养管理措施的改进有助于避免肉鸡规模化养殖中出现的疾病问题[1]。随着集约化养殖技术的不断推行,肉鸡从养殖场运往屠宰场的过程面临着多因素的综合压力[2]。活禽运输相比快递运输、冷链运输,在时效性方面要求更加严格,费时费力,不安全,...