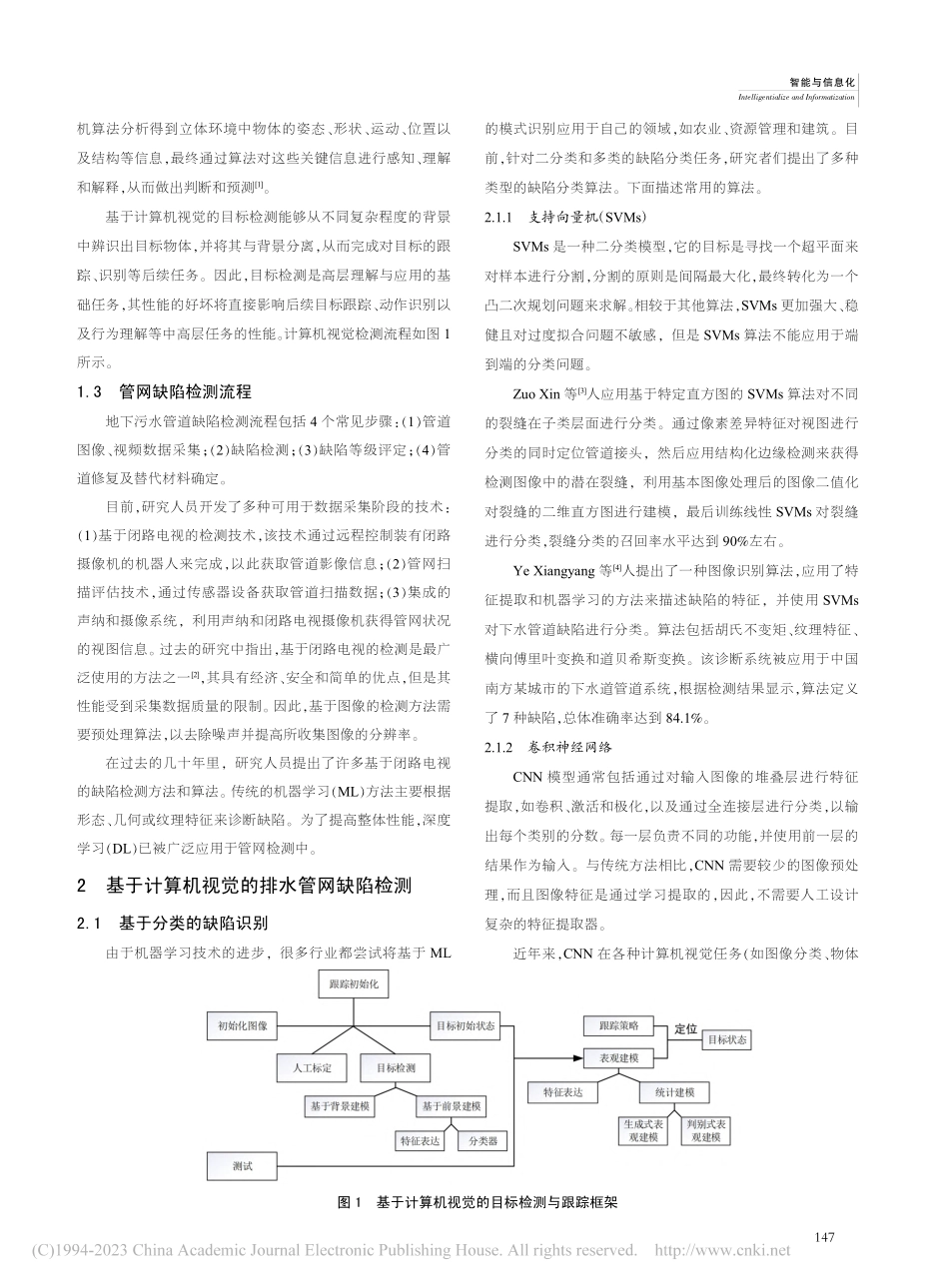
Construction&DesignForProject工程建设与设计1引言1.1研究背景地下排水系统是现代城市中最大的基础设施之一。健康、功能合理的排水系统能有效防止城市内涝,对水资源的可持续发展具有积极作用。然而,由于各种缺陷,如裂缝、偏移、地下水渗入和横向污水管侵入等使得许多国家的管网系统正在恶化,当务之急是需要对管网缺陷类型快速识别并对其状态进行评估,辅助后续修复工程。1.2计算机视觉检测计算机视觉检测是指用各种视频采集系统代替人类视觉器官对目标进行跟踪、检测与识别等。视觉系统通过CMOS、CCD等视频传感器采集到需要场景的视频后,进而通过计算【基金项目】上海勘测设计研究院有限公司科研项目资助(2021JC(8)-002)【作者简介】王宵(1982~),男,湖北天门人,副高级工程师,从事工程物探及检测相关技术研究。计算机视觉在管网缺陷快速定位中的应用进展AdvancesintheApplicationofComputerVisionintheRapidLocalizationofPipeNetworkDefects王宵1,郭剑桥2,杨鑫2,李杰1,刘志翔3,张强2(1.上海勘测设计研究院有限公司,上海200335;2.三峡智慧水务科技有限公司,上海200335;3.河海大学港口海岸与近海工程学院,南京210024)WANGXiao1,GUOJian-qiao2,YANGXin2,LIJie1,LIUZhi-xiang3,ZHANGQiang2(1.ShanghaiSurveyDesign&ResearchInstituteCo.Ltd.,Shanghai200335,China;2.ThreeGorgesWaterTechnologyCo.Ltd.,Shanghai200335,China;3.CollegeofPortCoastalandOffshoreEngineeringHohaiUniversity,Nanjing210024,China)【摘要】针对污水管道的缺陷检测和状态评估进行了简单阐述,从算法框架以及对算法采取的不同改进策略等方面对已有研究进行了分析。研究发现,不同的管网缺陷检测方法根据算法类别可以分为缺陷分类、缺陷检测和缺陷分割。从缺陷检测算法的精度和速度方面分析算法性能,并基于标准的评判指标对算法进行综合对比,最后基于当前研究的不足以及未来可能突破的技术难题,提出对未来研究的展望和方向。【Abstract】Inthispaper,thedefectdetectionandconditionevaluationofsewagepipelinearebrieflydescribed,andtheexistingresearchisanalyzedfromtheaspectsofalgorithmframeworkanddifferentimprovementstrategies.Itisfoundthatdifferentdefectdetectionmethodsofpipelinenetworkcanbedividedintodefectclassification,defectdetectionanddefectsegmentationaccordingtoalgorithmcategories.Theperformanceofdefectd...