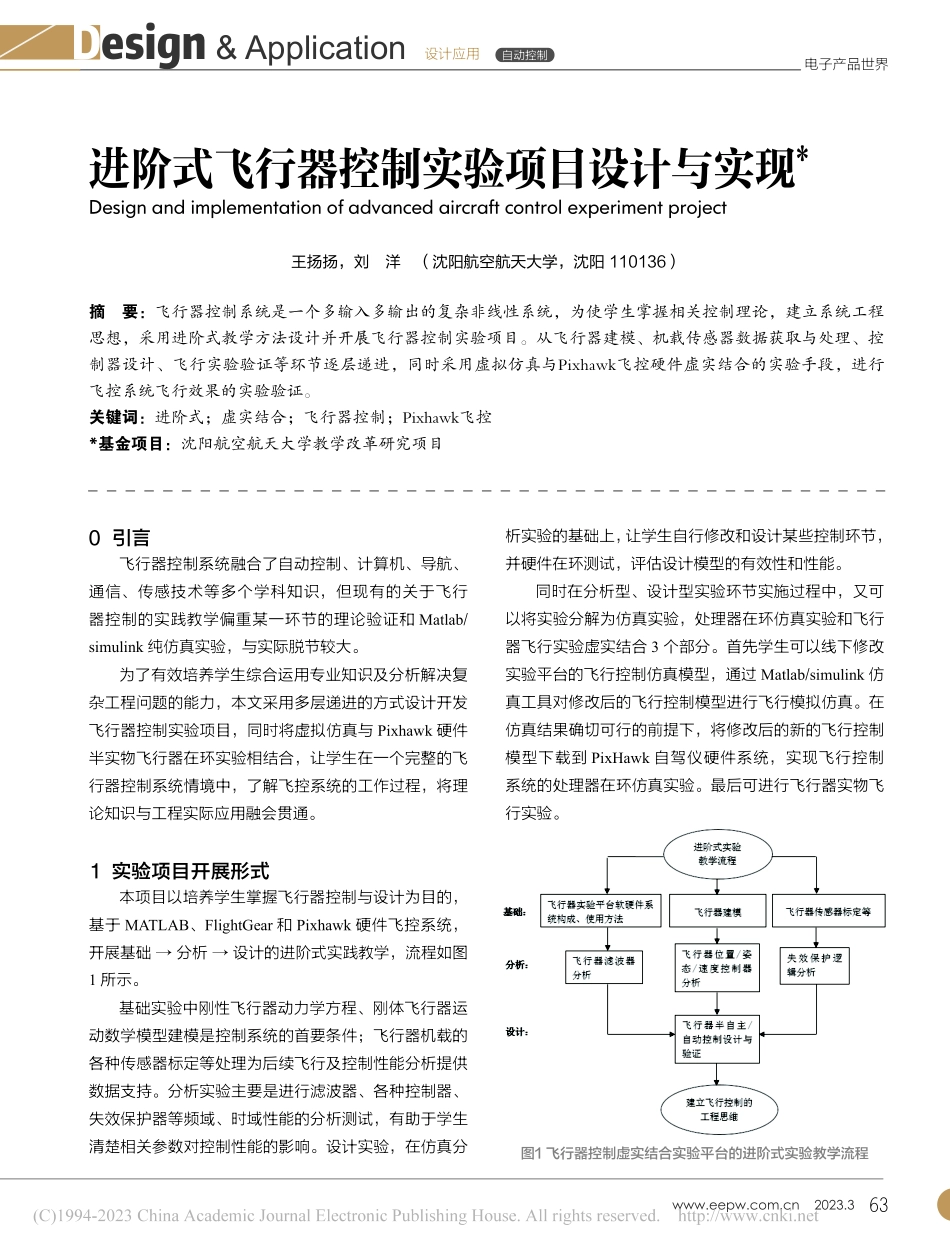
63www.eepw.com.cn2023.3电子产品世界设计应用Design&Application自动控制进阶式飞行器控制实验项目设计与实现*Designandimplementationofadvancedaircraftcontrolexperimentproject王扬扬,刘洋(沈阳航空航天大学,沈阳110136)摘要:飞行器控制系统是一个多输入多输出的复杂非线性系统,为使学生掌握相关控制理论,建立系统工程思想,采用进阶式教学方法设计并开展飞行器控制实验项目。从飞行器建模、机载传感器数据获取与处理、控制器设计、飞行实验验证等环节逐层递进,同时采用虚拟仿真与Pixhawk飞控硬件虚实结合的实验手段,进行飞控系统飞行效果的实验验证。关键词:进阶式;虚实结合;飞行器控制;Pixhawk飞控*基金项目:沈阳航空航天大学教学改革研究项目0引言飞行器控制系统融合了自动控制、计算机、导航、通信、传感技术等多个学科知识,但现有的关于飞行器控制的实践教学偏重某一环节的理论验证和Matlab/simulink纯仿真实验,与实际脱节较大。为了有效培养学生综合运用专业知识及分析解决复杂工程问题的能力,本文采用多层递进的方式设计开发飞行器控制实验项目,同时将虚拟仿真与Pixhawk硬件半实物飞行器在环实验相结合,让学生在一个完整的飞行器控制系统情境中,了解飞控系统的工作过程,将理论知识与工程实际应用融会贯通。1实验项目开展形式本项目以培养学生掌握飞行器控制与设计为目的,基于MATLAB、FlightGear和Pixhawk硬件飞控系统,开展基础→分析→设计的进阶式实践教学,流程如图1所示。基础实验中刚性飞行器动力学方程、刚体飞行器运动数学模型建模是控制系统的首要条件;飞行器机载的各种传感器标定等处理为后续飞行及控制性能分析提供数据支持。分析实验主要是进行滤波器、各种控制器、失效保护器等频域、时域性能的分析测试,有助于学生清楚相关参数对控制性能的影响。设计实验,在仿真分析实验的基础上,让学生自行修改和设计某些控制环节,并硬件在环测试,评估设计模型的有效性和性能。同时在分析型、设计型实验环节实施过程中,又可以将实验分解为仿真实验,处理器在环仿真实验和飞行器飞行实验虚实结合3个部分。首先学生可以线下修改实验平台的飞行控制仿真模型,通过Matlab/simulink仿真工具对修改后的飞行控制模型进行飞行模拟仿真。在仿真结果确切可行的前提下,将修改后的新的飞行控制模型下载到PixHawk自驾仪硬件系统,实现飞行控制系统的处理器在环仿真实验。最后可进行飞行器实物飞行实验。图1飞行器控制虚实结合实验平台的进...