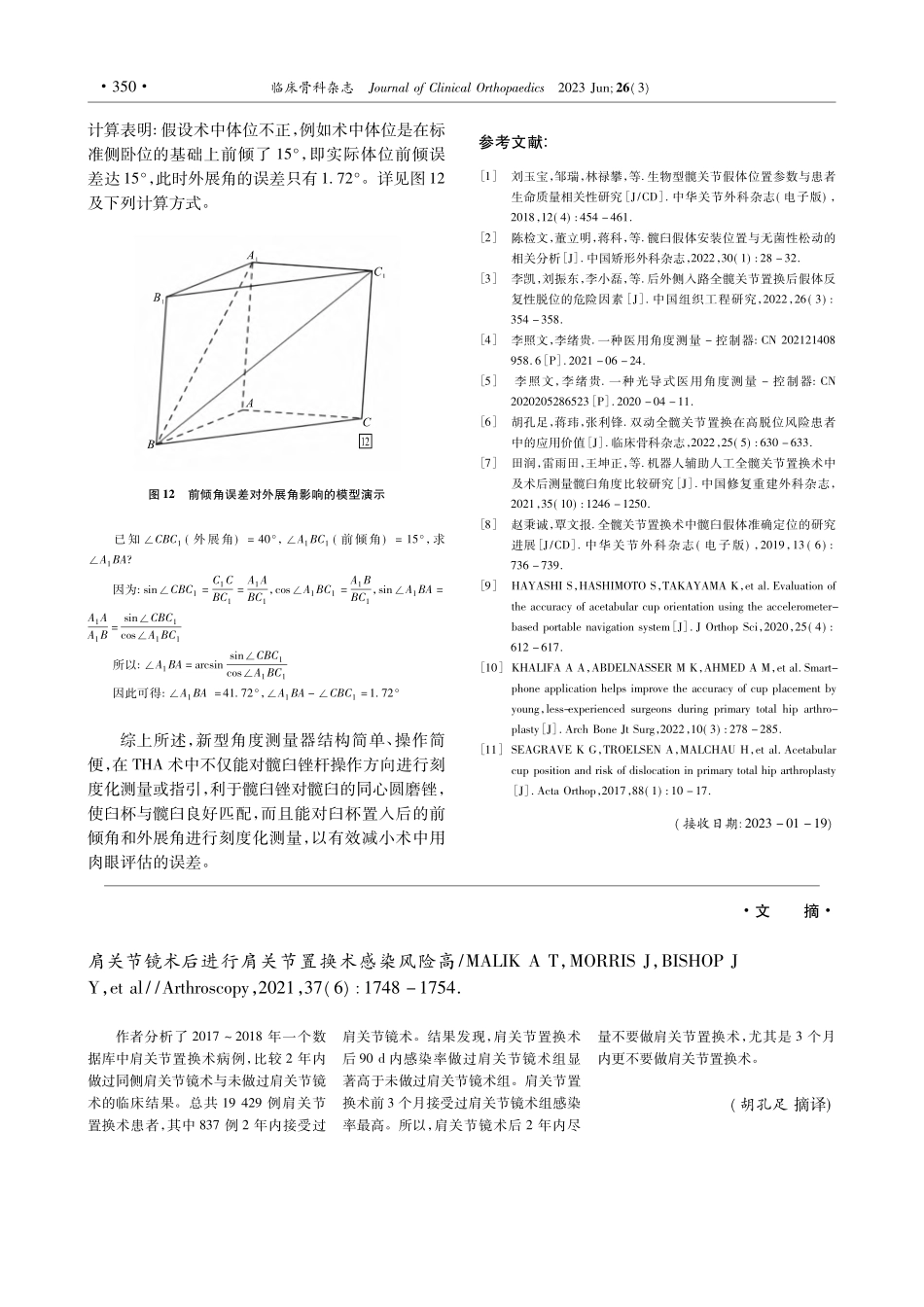
计算表明:假设术中体位不正,例如术中体位是在标准侧卧位的基础上前倾了15°,即实际体位前倾误差达15°,此时外展角的误差只有1.72°。详见图12及下列计算方式。图12前倾角误差对外展角影响的模型演示已知∠CBC1(外展角)=40°,∠A1BC1(前倾角)=15°,求∠A1BA?因为:sin∠CBC1=C1CBC1=A1ABC1,cos∠A1BC1=A1BBC1,sin∠A1BA=A1AA1B=sin∠CBC1cos∠A1BC1所以:∠A1BA=arcsinsin∠CBC1cos∠A1BC1因此可得:∠A1BA=41.72°,∠A1BA-∠CBC1=1.72°综上所述,新型角度测量器结构简单、操作简便,在THA术中不仅能对髋臼锉杆操作方向进行刻度化测量或指引,利于髋臼锉对髋臼的同心圆磨锉,使臼杯与髋臼良好匹配,而且能对臼杯置入后的前倾角和外展角进行刻度化测量,以有效减小术中用肉眼评估的误差。参考文献:[1]刘玉宝,邹瑞,林禄攀,等.生物型髋关节假体位置参数与患者生命质量相关性研究[J/CD].中华关节外科杂志(电子版),2018,12(4):454-461.[2]陈检文,董立明,蒋科,等.髋臼假体安装位置与无菌性松动的相关分析[J].中国矫形外科杂志,2022,30(1):28-32.[3]李凯,刘振东,李小磊,等.后外侧入路全髋关节置换后假体反复性脱位的危险因素[J].中国组织工程研究,2022,26(3):354-358.[4]李照文,李绪贵.一种医用角度测量-控制器:CN202121408958.6[P].2021-06-24.[5]李照文,李绪贵.一种光导式医用角度测量-控制器:CN2020205286523[P].2020-04-11.[6]胡孔足,蒋玮,张利锋.双动全髋关节置换在高脱位风险患者中的应用价值[J].临床骨科杂志,2022,25(5):630-633.[7]田润,雷雨田,王坤正,等.机器人辅助人工全髋关节置换术中及术后测量髋臼角度比较研究[J].中国修复重建外科杂志,2021,35(10):1246-1250.[8]赵秉诚,覃文报.全髋关节置换术中髋臼假体准确定位的研究进展[J/CD].中华关节外科杂志(电子版),2019,13(6):736-739.[9]HAYASHIS,HASHIMOTOS,TAKAYAMAK,etal.Evaluationoftheaccuracyofacetabularcuporientationusingtheaccelerometer-basedportablenavigationsystem[J].JOrthopSci,2020,25(4):612-617.[10]KHALIFAAA,ABDELNASSERMK,AHMEDAM,etal.Smart-phoneapplicationhelpsimprovetheaccuracyofcupplacementbyyoung,less-experiencedsurgeonsduringprimarytotalhiparthro-plasty[J].ArchBoneJtSurg,2022,10(3):278-285.[11]SEAGRAVE...