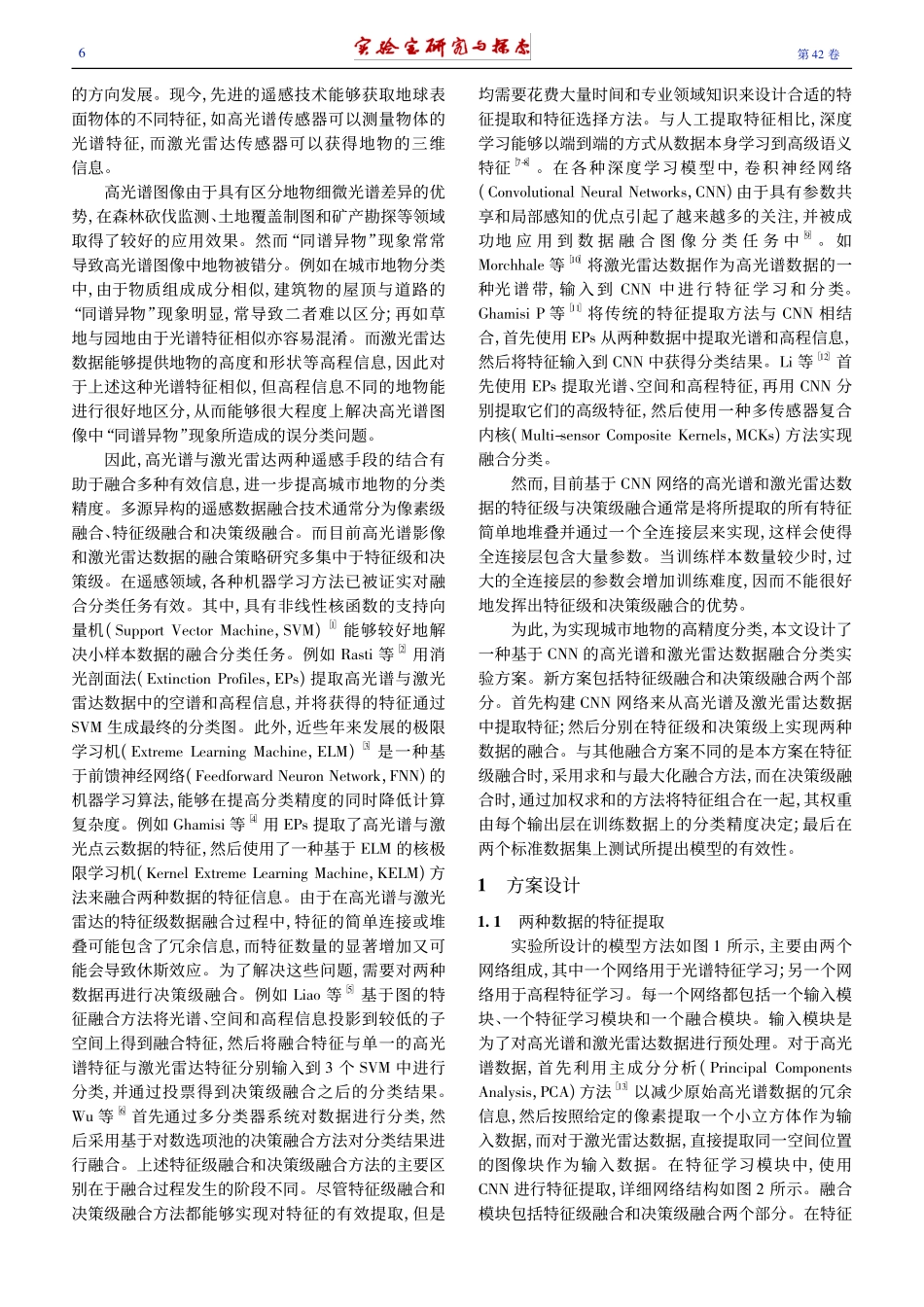
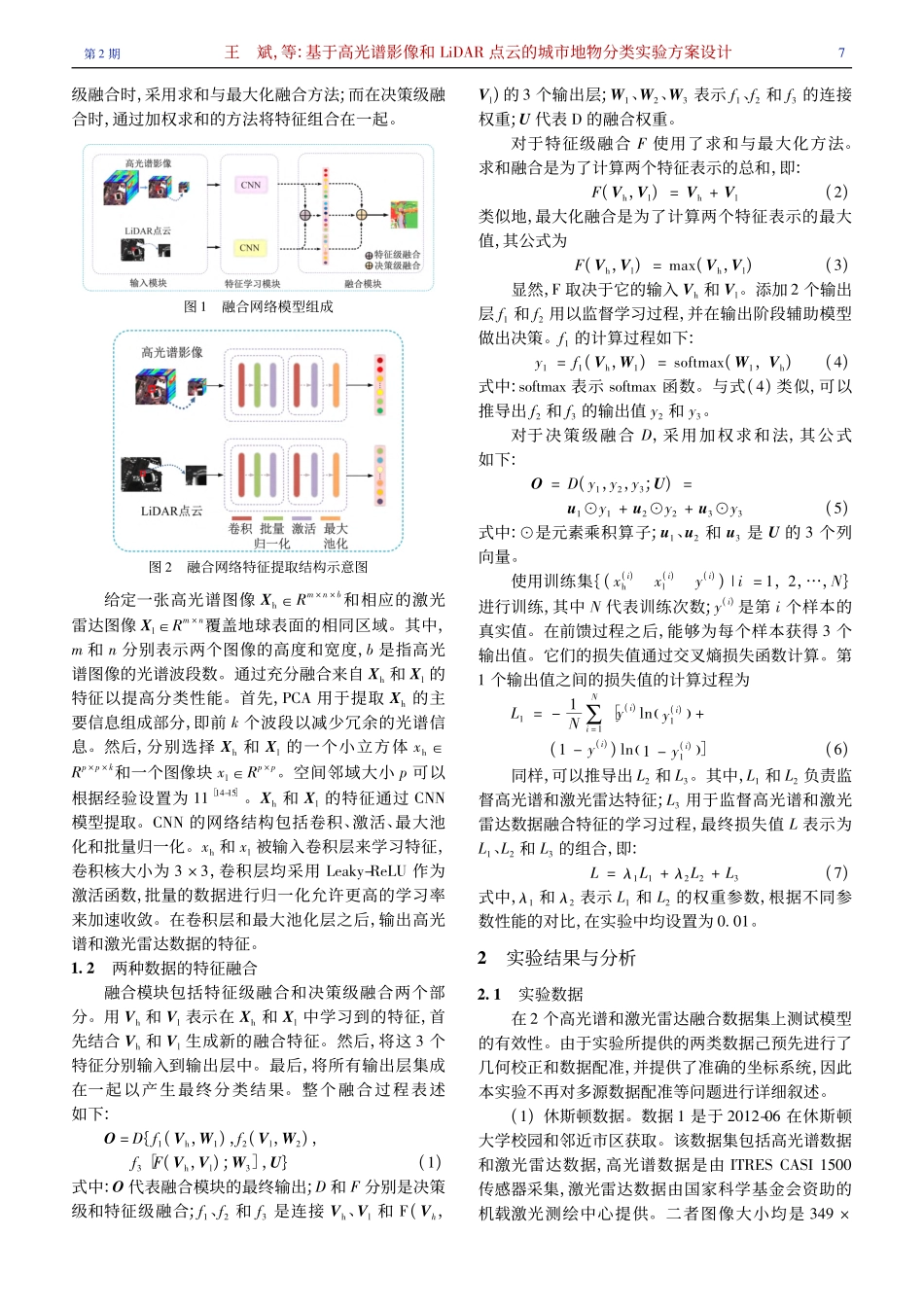
ISSN1006-7167CN31-1707/TRESEARCHANDEXPLORATIONINLABORATORY第42卷第2期Vol.42No.22023年2月Feb.2023DOI:10.19927/j.cnki.syyt.2023.02.002基于高光谱影像和LiDAR点云的城市地物分类实验方案设计王斌,宋冬梅,戴嵩,王海起(中国石油大学(华东)海洋与空间信息学院,山东青岛266580)摘要:为更好地进行数据融合实现地物分类,设计了一种基于卷积神经网络(CNN)的高光谱与激光雷达数据融合分类实验方案。首先通过构建CNN模型实现高光谱及激光雷达数据的特征提取;然后分别在特征级和决策级上实现两种数据的融合,其中特征级融合采取求和与最大化策略,决策级融合采取加权融合策略;最后在休斯顿与特伦托数据集上使用标准训练集与测试集验证该模型的有效性。结果表明,相较于SVM和ELM两种对比方案,此方案总体分类精度分别提升了10.18%和8.75%。证实了新方案能够实现更高精度的城市地物分类。关键词:地物分类;高光谱图像;激光雷达;卷积神经网络;特征融合中图分类号:TP751文献标志码:A文章编号:1006-7167(2023)02-0005-06ANovelExperimentalSchemeforUrbanGroundObjectClassificationBasedonHyperspectralImageandLiDARPointCloudDataWANGBin,SONGDongmei,DAISong,WANGHaiqi(CollegeofOceanographyandSpaceInformatics,ChinaUniversityofPetroleum(EastChina),Qingdao266580,Shandong,China)Abstract:Withthepurposeofbettercompletinggroundobjectclassification,anovelclassificationschemehasbeenproposedbasedonconvolutionalneuralnetwork(CNN)withafusionofhyperspectralandLiDARdata.Firstly,featureextractionofhyperspectralandLiDARdataisachievedbyconstructedCNNmodel.Then,thefusionofthetwokindsofdataisimplementedatthefeaturelevelandthedecisionlevel,respectively.Thesummationandmaximizationstrategyareadoptedinthefeaturelevelfusion,andtheweightedfusionstrategyisusedfordecision-levelfusion.Finally,thevalidityofthemodelisverifiedbytheexperimentonthestandardtrainingsetandtestsetonHoustonandTrentodata.TheresultsshowthatcomparedwithSVMandELM,theoverallclassificationaccuracyofthisschemeisimprovedby10.18%and8.75%,respectively,Itisconfirmedthatthenewschemecanobtainhigherprecisionurbanfeatureclassification.Keywords:groundobjectclassification;hypersp...