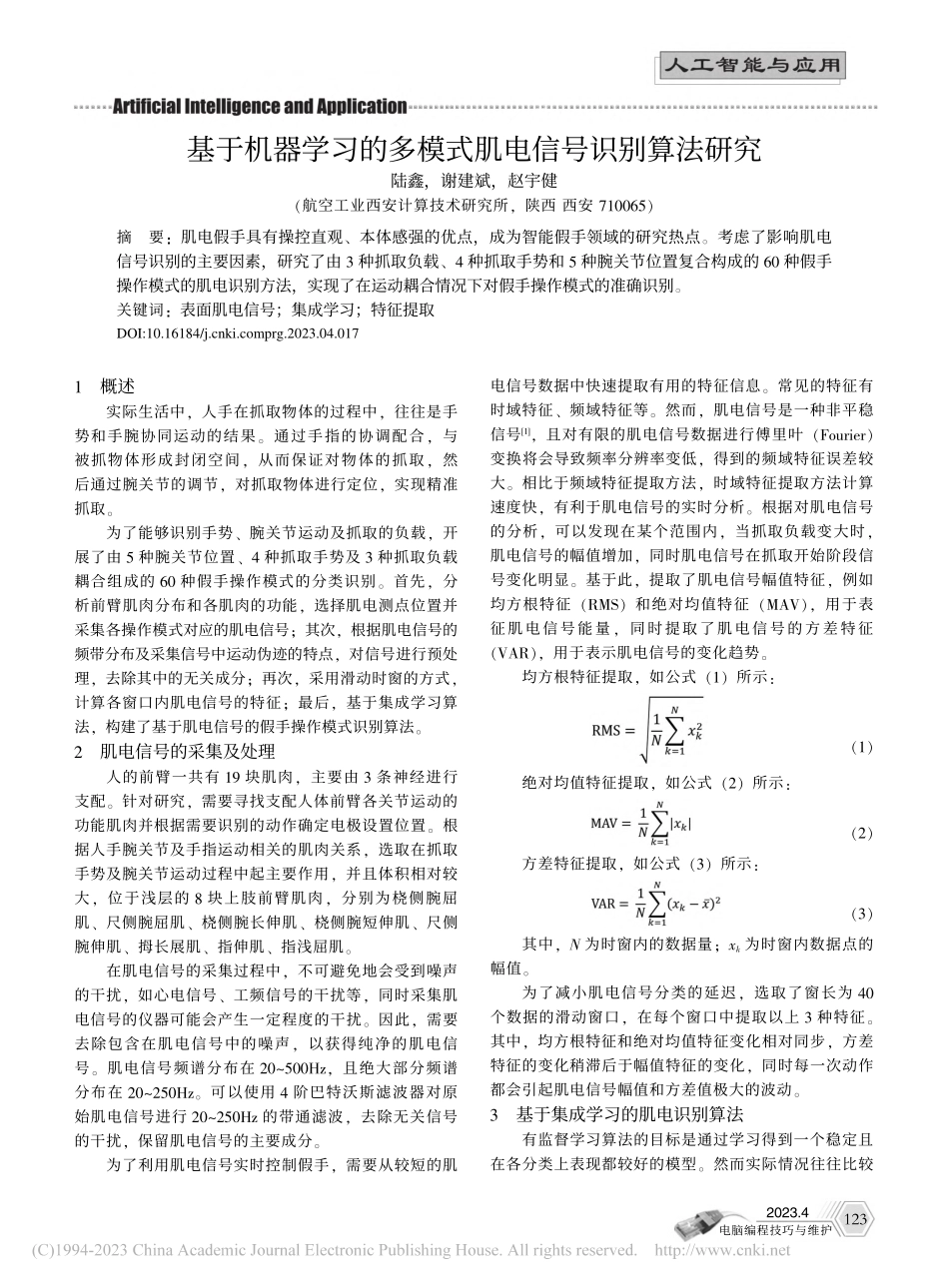
2023.4电脑编程技巧与维护1概述实际生活中,人手在抓取物体的过程中,往往是手势和手腕协同运动的结果。通过手指的协调配合,与被抓物体形成封闭空间,从而保证对物体的抓取,然后通过腕关节的调节,对抓取物体进行定位,实现精准抓取。为了能够识别手势、腕关节运动及抓取的负载,开展了由5种腕关节位置、4种抓取手势及3种抓取负载耦合组成的60种假手操作模式的分类识别。首先,分析前臂肌肉分布和各肌肉的功能,选择肌电测点位置并采集各操作模式对应的肌电信号;其次,根据肌电信号的频带分布及采集信号中运动伪迹的特点,对信号进行预处理,去除其中的无关成分;再次,采用滑动时窗的方式,计算各窗口内肌电信号的特征;最后,基于集成学习算法,构建了基于肌电信号的假手操作模式识别算法。2肌电信号的采集及处理人的前臂一共有19块肌肉,主要由3条神经进行支配。针对研究,需要寻找支配人体前臂各关节运动的功能肌肉并根据需要识别的动作确定电极设置位置。根据人手腕关节及手指运动相关的肌肉关系,选取在抓取手势及腕关节运动过程中起主要作用,并且体积相对较大,位于浅层的8块上肢前臂肌肉,分别为桡侧腕屈肌、尺侧腕屈肌、桡侧腕长伸肌、桡侧腕短伸肌、尺侧腕伸肌、拇长展肌、指伸肌、指浅屈肌。在肌电信号的采集过程中,不可避免地会受到噪声的干扰,如心电信号、工频信号的干扰等,同时采集肌电信号的仪器可能会产生一定程度的干扰。因此,需要去除包含在肌电信号中的噪声,以获得纯净的肌电信号。肌电信号频谱分布在20~500Hz,且绝大部分频谱分布在20~250Hz。可以使用4阶巴特沃斯滤波器对原始肌电信号进行20~250Hz的带通滤波,去除无关信号的干扰,保留肌电信号的主要成分。为了利用肌电信号实时控制假手,需要从较短的肌电信号数据中快速提取有用的特征信息。常见的特征有时域特征、频域特征等。然而,肌电信号是一种非平稳信号[1],且对有限的肌电信号数据进行傅里叶(Fourier)变换将会导致频率分辨率变低,得到的频域特征误差较大。相比于频域特征提取方法,时域特征提取方法计算速度快,有利于肌电信号的实时分析。根据对肌电信号的分析,可以发现在某个范围内,当抓取负载变大时,肌电信号的幅值增加,同时肌电信号在抓取开始阶段信号变化明显。基于此,提取了肌电信号幅值特征,例如均方根特征(RMS)和绝对均值特征(MAV),用于表征肌电信号能量,同时提取了肌电信号的方差特征(VAR),用于表示肌电信号的变化趋势。均方根...