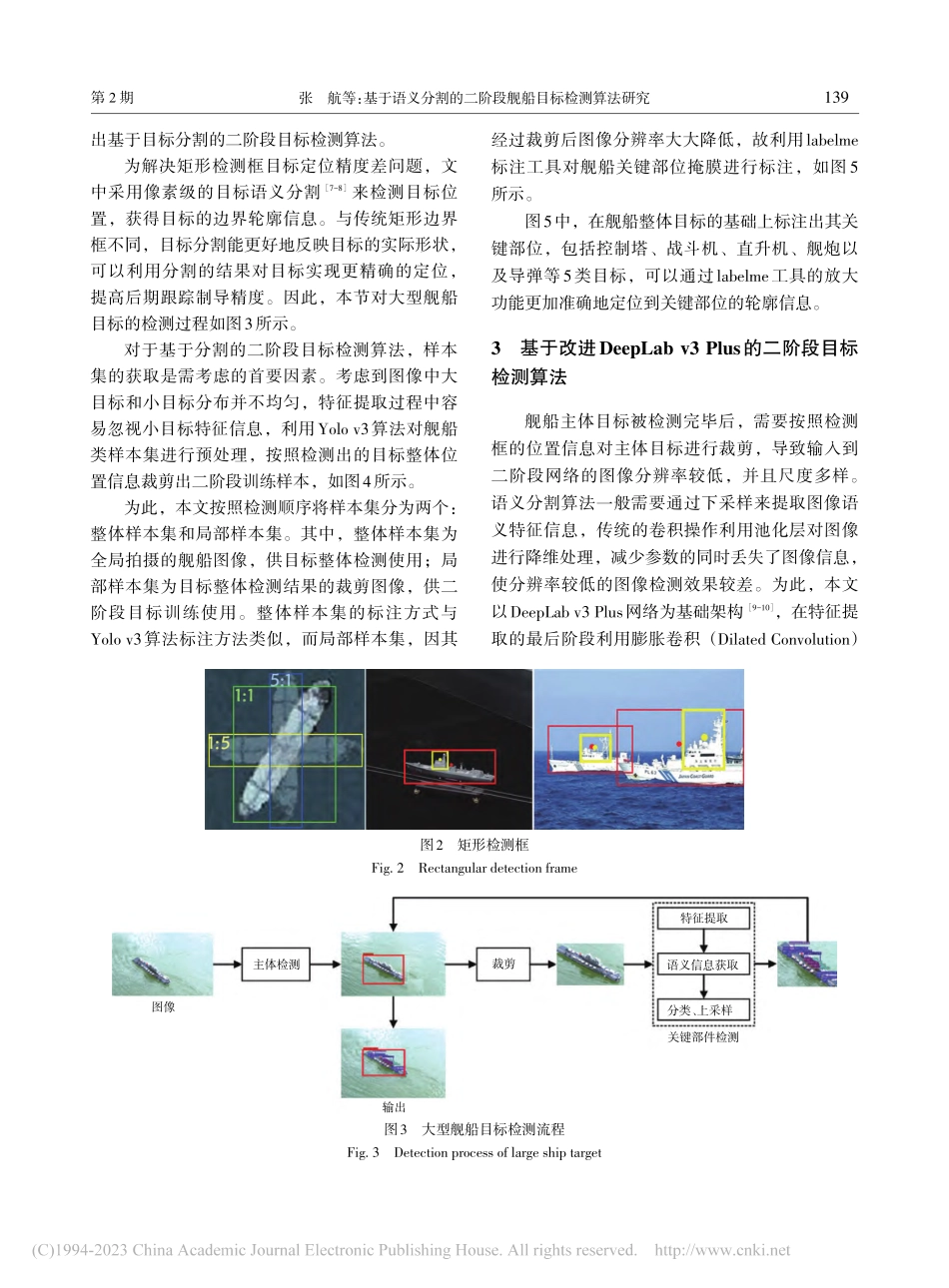
第2期2023年3月No.2Mar.2023战术导弹技术TacticalMissileTechnology基于语义分割的二阶段舰船目标检测算法研究张航,田宗浩*,李泳,彭羽茜(陆军炮兵防空兵学院高过载弹药制导控制与信息感知实验室,合肥230031)摘要:为提高图像制导弹药对大型舰船目标的毁伤效能,解决大型舰船目标关键部位漏检和定位精度差等问题,以Yolov3为基线网络,提出了基于语义分割的二阶段目标检测算法。在主体目标准确检测的基础上,利用DeepLabv3plus网络在主体目标区域进行像素级检测,确定舰船关键部位的轮廓边界,提高了舰船关键部位的检测精度和定位精度。利用Linearbottlenecks结构在低分辨率主体目标中提取特征,减少特征损失,降低模型计算量和参数量,获得了较高的检测精度和定位精度,同时提高了算法的处理速度。关键词:图像制导;舰船;目标检测;Yolov3;弹载图像;语义分割中图分类号:TN911.73文献标识码:A文章编号:1009-1300(2023)02-0137-07DOI:10.16358/j.issn.1009-1300.20220590Two-stageshipobjectdetectionalgorithmbasedonsemanticsegmentationZhangHang,TianZonghao*,LiYong,PengYuqian(LaboratoryofGuidanceControlandInformationPerceptionTechnologyofHighOverloadProjectiles,ArmyAcademyofArtilleryandAirDefense,Hefei230031,China)Abstract:Inordertoimprovethedamageefficiencyofimage-guidancemissiletothelargeships,andtosolvetheproblemsofmissinginspectionandpoorpositioningaccuracyofkeypartsoflargeships,Yolov3isusedasthebaselinenetworkandtwo-stageobjectdetectionalgorithmbasedonsemanticsegmentationisputforward.Onthebasisoftheaccuratedetectionofthemaintarget,thepixel-leveldetectioniscarriedoutinthemaintargetareabyDeepLabv3Plusnetwork,soastodeterminetheboundaryofkeypartsoftheshipandimprovethedetectionandlocationaccuracy.Inaddition,inordertoreducethelossoffeaturesandthenumberofparameters,theLinearbottlenecksmoduleisusedforextractingthefeaturesinlowresolutionimage,whichimprovesthedetectionaccuracyandtheprocessingspeedofthealgorithm.Keywords:imageguidance;ship;objectdetection;Yolov3;missile-borneimage;semanticseg‐mentation收稿日期:2022-06-30;修回日期:2022-10-30基金项目:军队“十三五”预研基金(301070103)作者简介:张航,博士研究生,主...