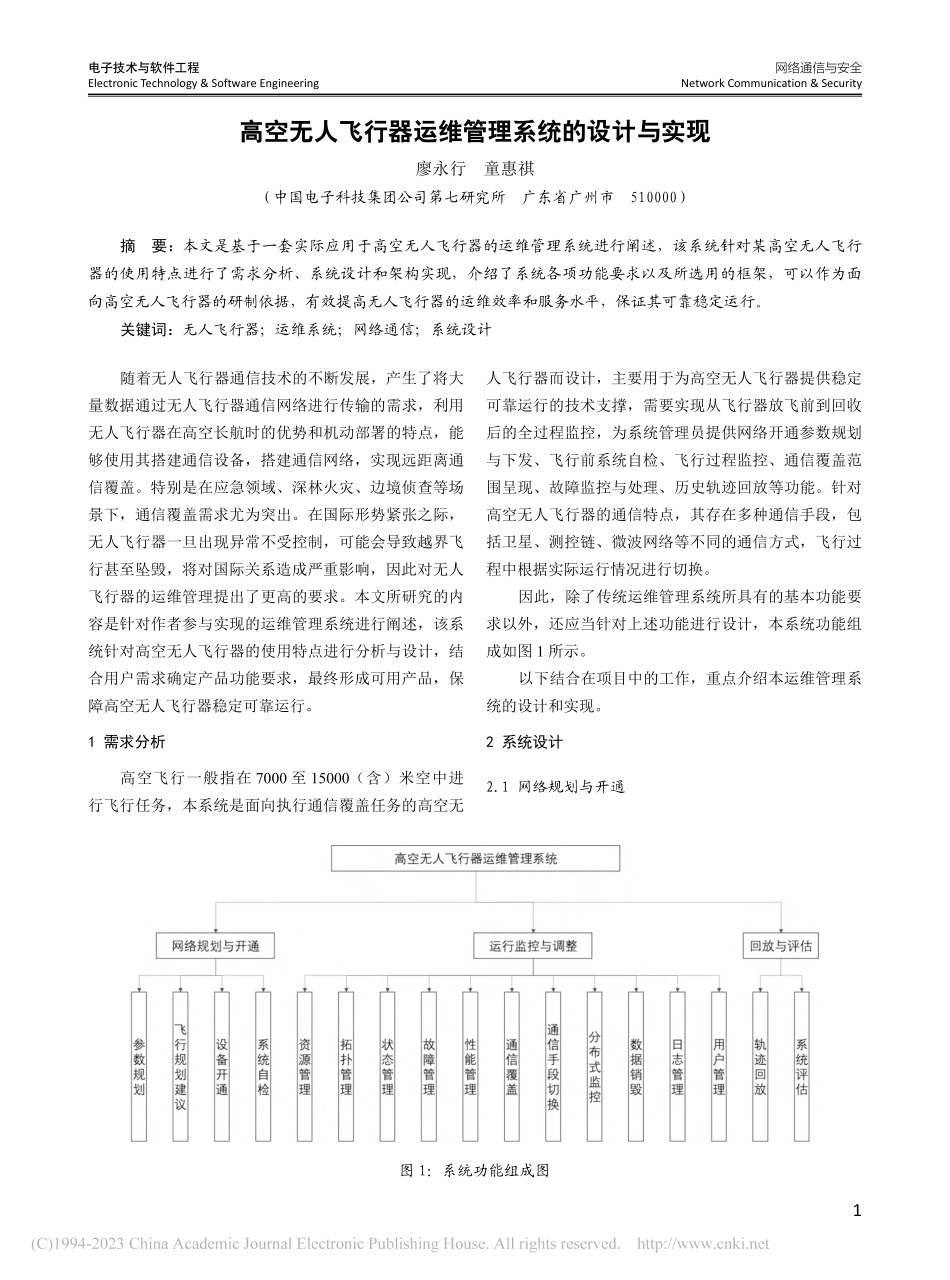
1网络通信与安全NetworkCommunication&Security电子技术与软件工程ElectronicTechnology&SoftwareEngineering随着无人飞行器通信技术的不断发展,产生了将大量数据通过无人飞行器通信网络进行传输的需求,利用无人飞行器在高空长航时的优势和机动部署的特点,能够使用其搭建通信设备,搭建通信网络,实现远距离通信覆盖。特别是在应急领域、深林火灾、边境侦查等场景下,通信覆盖需求尤为突出。在国际形势紧张之际,无人飞行器一旦出现异常不受控制,可能会导致越界飞行甚至坠毁,将对国际关系造成严重影响,因此对无人飞行器的运维管理提出了更高的要求。本文所研究的内容是针对作者参与实现的运维管理系统进行阐述,该系统针对高空无人飞行器的使用特点进行分析与设计,结合用户需求确定产品功能要求,最终形成可用产品,保障高空无人飞行器稳定可靠运行。1需求分析高空飞行一般指在7000至15000(含)米空中进行飞行任务,本系统是面向执行通信覆盖任务的高空无人飞行器而设计,主要用于为高空无人飞行器提供稳定可靠运行的技术支撑,需要实现从飞行器放飞前到回收后的全过程监控,为系统管理员提供网络开通参数规划与下发、飞行前系统自检、飞行过程监控、通信覆盖范围呈现、故障监控与处理、历史轨迹回放等功能。针对高空无人飞行器的通信特点,其存在多种通信手段,包括卫星、测控链、微波网络等不同的通信方式,飞行过程中根据实际运行情况进行切换。因此,除了传统运维管理系统所具有的基本功能要求以外,还应当针对上述功能进行设计,本系统功能组成如图1所示。以下结合在项目中的工作,重点介绍本运维管理系统的设计和实现。2系统设计2.1网络规划与开通高空无人飞行器运维管理系统的设计与实现廖永行童惠祺(中国电子科技集团公司第七研究所广东省广州市510000)摘要:本文是基于一套实际应用于高空无人飞行器的运维管理系统进行阐述,该系统针对某高空无人飞行器的使用特点进行了需求分析、系统设计和架构实现,介绍了系统各项功能要求以及所选用的框架,可以作为面向高空无人飞行器的研制依据,有效提高无人飞行器的运维效率和服务水平,保证其可靠稳定运行。关键词:无人飞行器;运维系统;网络通信;系统设计图1:系统功能组成图2网络通信与安全NetworkCommunication&Security电子技术与软件工程ElectronicTechnology&SoftwareEngineering网络规划与开通主要是支撑用户在飞行器起飞前进行的规划和开通工作,并完成自检,保证飞行器上...