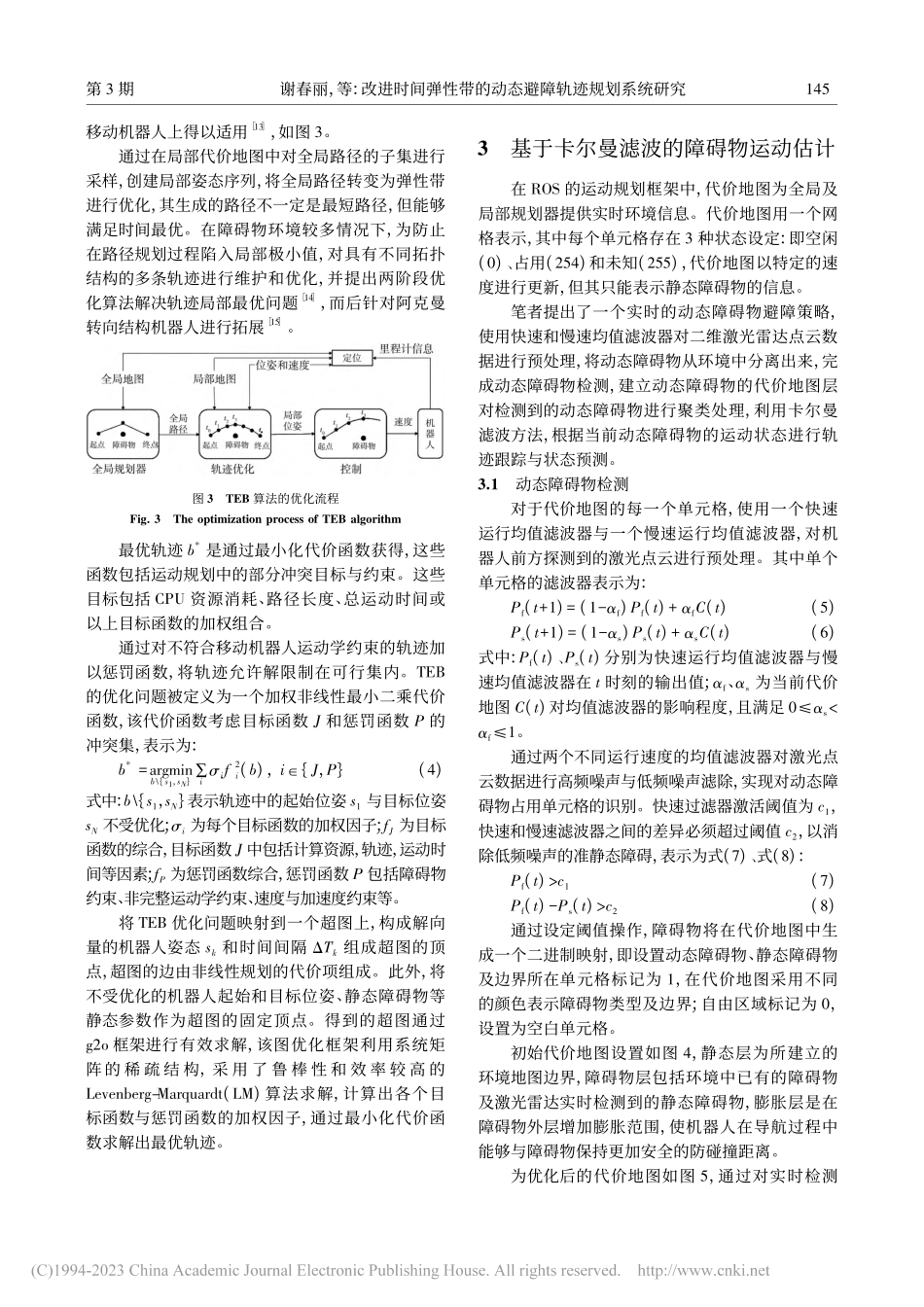
第42卷第3期重庆交通大学学报(自然科学版)Vol.42No.32023年3月JOURNALOFCHONGQINGJIAOTONGUNIVERSITY(NATURALSCIENCE)Mar.2023DOI:10.3969/j.issn.1674-0696.2023.03.20改进时间弹性带的动态避障轨迹规划系统研究谢春丽,刘斐灏(东北林业大学交通学院,黑龙江哈尔滨150040)摘要:在动态障碍物存在的机器人导航场景下,时间弹性带算法(timedelasticbands,TEB)无法区分障碍物类型,易将动态障碍物视为静态类型去处理,致使导航过程出现碰撞而无法完成导航任务。针对机器人运行真实动态环境,采用两个均值滤波器对激光点云进行滤波处理,实现动态障碍物的检测,而后增加动态障碍物代价地图层对检测到的障碍物进行聚类,利用卡尔曼滤波对动态障碍物的运动状态进行轨迹跟踪及状态预测,结合机器人当前运动状态作出动态避障的轨迹规划,采用阿克曼转向结构机器人进行仿真及真实动态环境下的重复实验。研究结果表明:改进TEB算法的动态避障轨迹规划系统能够在复杂动态环境中进行实时轨迹规划,生成安全平滑的局部轨迹,实现动态避障完成导航任务,能够满足移动机器人的动态避障要求。关键词:车辆与机电工程;时间弹性带算法;动态避障;卡尔曼滤波;轨迹规划中图分类号:TP242;U461文献标志码:A文章编号:1674-0696(2023)03-143-08DynamicObstacleAvoidanceTrajectoryPlanningSystemwithImprovedTimed-Elastic-BandsXIEChunli,LIUFeihao(SchoolofTraffic&Transportation,NortheastForestryUniversity,Harbin150040,Heilongjiang,China)Abstract:Intherobotnavigationscenewithdynamicobstacles,thetimedelasticbands(TEB)algorithmcannotdistinguishthetypesofobstacles,anditiseasytotreatdynamicobstaclesasstatictypes,resultingincollisionsinthenavigationprocessandunabletocompletethenavigationtask.Aimingattherealdynamicenvironmentoftherobot,twomeanfilterswereusedtofilterthelaserpointcloudtoachievedynamicobstacledetection,andthenthedynamicobstaclecostmaplayerwasaddedtoclusterthedetectedobstacles.Kalmanfilteringwasusedtoperformthetrajectorytrackingandstatepredictiononthemotionstateofdynamicobstacles.Basedonthecurrentmotionstateoftherobot,adynamicobstacleavoidancetrajectoryplanwascarriedout.TheAckermansteeringstructurerobotwasusedforsimulationandtherepeatedexperimentsinrealdynami...