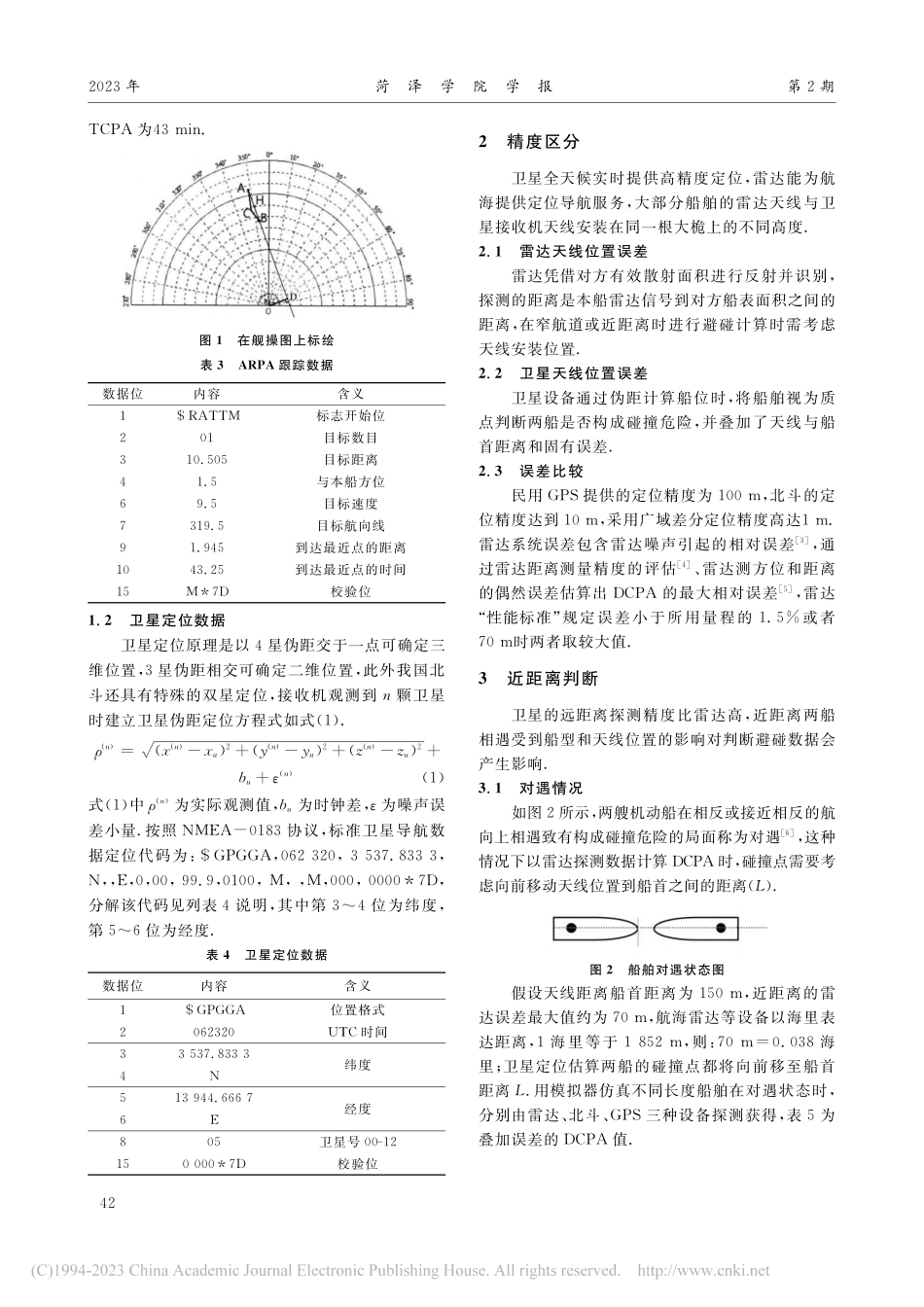
ECDIS船位的选择及基于卡尔曼滤波标绘的研究*江衍煊1,林晨1,陈福金1,王仙水1,江书洋2(1.福建船政交通职业学院航海系,福建福州350007;2.上海交通大学电子信息与电气学院,上海200434)摘要:为了保证船舶航行操纵中使用电子海图显示与信息系统(ECDIS)时,能更精确地标绘出本船与它船构成的危险程度.首先分析了航海雷达和卫星定位导航数据的原理和作用,然后再根据雷达、北斗和GPS卫星导航数据,在操纵船舶避碰时能恰当地选用更高精度的设备.船舶是根据未来船位进行预估危险然后采取行动避碰,卡尔曼滤波方式可预估出未来时刻的船位,通过Matlab仿真得出卡尔曼预估的船位基本上与实际船位误差符合航海要求,因此可用卡尔曼滤波方式进行预判两船是否存在危险.关键词:定位;ECDIS;会遇距离;卡尔曼滤波;仿真中图分类号:U675文献标识码:A文章编号:1673-2103(2023)02-0041-050引言电子海图显示与信息系统(ECDIS)作为船舶导航信息终端把各种导航传感器组集合成一体,在海图的基础上显示船舶航行安全的信息,已成为现代船舶综合导航的核心.ECDIS具有多个传输船位和航向航速的传感器,定位传感器包括雷达和卫星设备,在航行水域中提供本船和附近其它目标之间的位置并作出避碰操纵决策.ECDIS应用图层方式把图像叠加到一起,优势是将海图的基本信息,如岸线、碍航物、浮标和水上物标等与雷达回波或者卫星定位信息进行参照,便于判断目标回波是否构成危险.1定位船舶在不同海况下设备的误差可由导航仪器的误差与安装位置的距离叠加,目前船舶定位设备主要是雷达和卫星导航设备.1.1雷达定位数据雷达是获得船舶航行水域船位数据的主要来源[1],卫星导航设备以现代信息技术连续提供高精度船位.雷达在二维极坐标系中测出的是极坐标信息完成模拟/数字变换和坐标变换后显示在电子海图.航海雷达扫描周期为2.5s,定位方式以本船作为坐标原点,物标位置信息用极坐标表示,部分定位数据如表1所示.表1雷达定位数据数据位具体内容含义1$RARSD开始90.847本船指针列表10123.7指针方位度数111.500量程刻度12N量程单位14H*5A校验位例如本船真航向为350°,航速9.5节时扫描得到如表2所示3个雷达回波信息.表2回波信息回波时刻方位距离/海里A点10:35左舷01.5°10.5H点10...