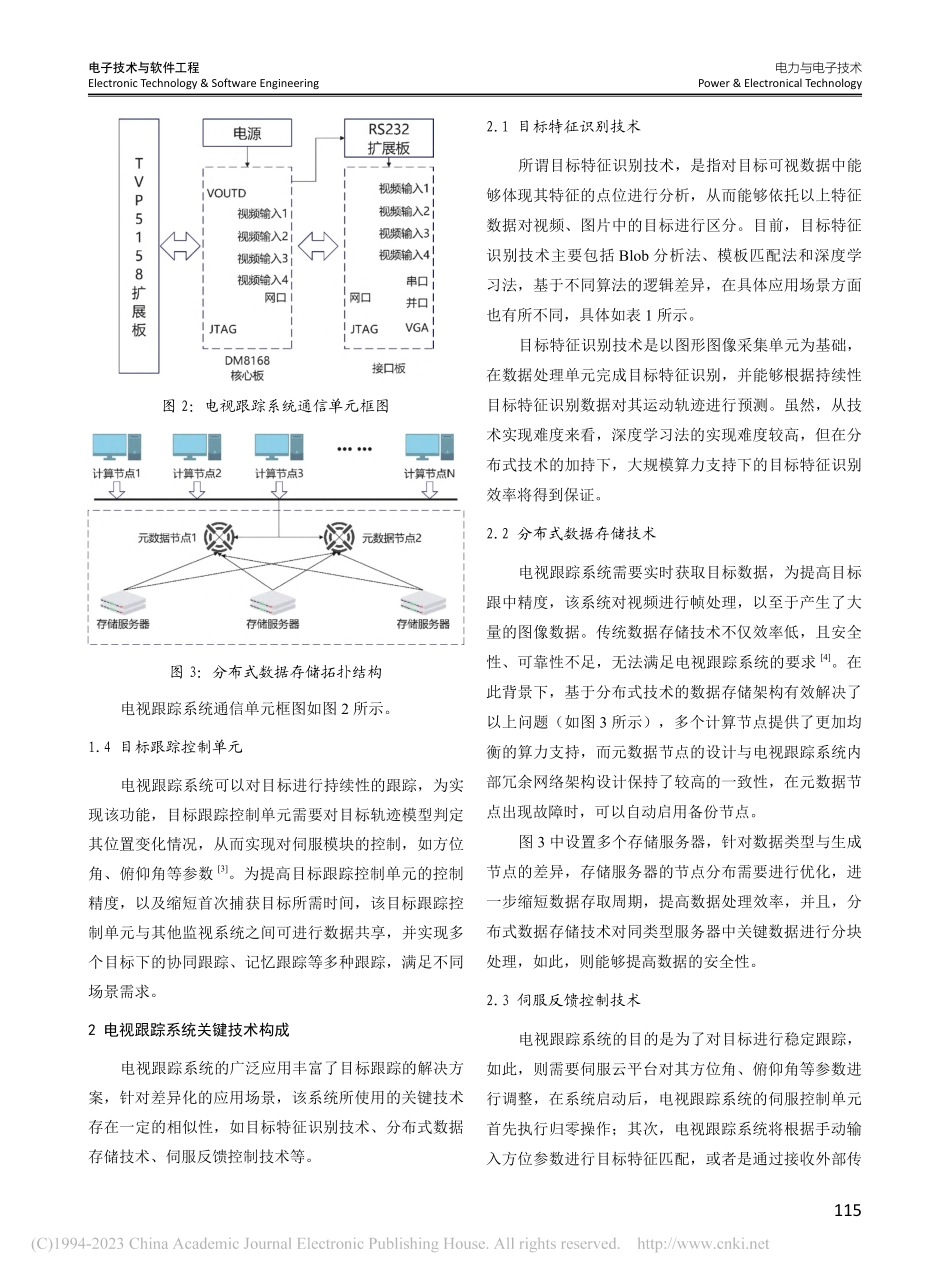
电力与电子技术Power&ElectronicalTechnology电子技术与软件工程ElectronicTechnology&SoftwareEngineering114随着电子信息技术的不断发展,以电视跟踪系统为代表的新型光电设备在生产制造、交通管理等多个领域得到了广泛应用。虽然,与传统跟踪系统来说,电视跟踪系统精度明显增加,可靠性也有着不同程度的提升,但相关故障现象更加复杂,且故障定位和处理难度增加,这对工程技术人员提出了较高要求。1电视跟踪系统整体架构现代光学技术的发展提高了摄录设备的图像质量,而图形图像识别技术与高精度伺服控制技术为动态跟踪提供了支撑,通过优化图形图像处理和跟踪算法,电视跟踪系统在社会各领域得到了推广应用[1]。电视跟踪系统由图形图像采集单元、数据处理单元、通信单元和目标跟踪控制单元组成(如图1所示),并基于目标数据形成的反馈控制机制实现稳定跟踪。1.1图形图像采集单元电视跟踪系统采用了较为传统的高清视频采集模块,通过安装在云台上的摄录设备,该单元能够获取目标可视化信息,为数据处理单元提供高清视频、图像数据。图形图像采集单元通过视频编码模块、视频解码模块、数字信号处理器等实现视频、图像信号的采集、传输、存储和处理,并能够实现跨系统的图形图像信息共享。1.2数据处理单元电视跟踪系统中的关键数据主要包括视频、图像特征数据,以及伺服控制系统方位、俯仰数据,为保证较高的跟踪精度,数据处理单元不仅预留了高精度反馈控制的数据通信接口,在算法方面也进行了优化[2]。目标特征点的提取与动态分析的轨迹预测等功能使电视跟踪系统的智能化、自动化水平明显提升。同时,电视跟踪系统数据处理单元还包括多个数据库和服务器,为提高数据处理效率,通过分布式技术调用该系统覆盖范围内的所有算力资源,并提高了数据存储的安全性。1.3通信单元电视跟踪系统传输的数据多为视频、音频与控制指令,针对不同的数据类型,通信单元在完善网络拓扑结构的基础上,还需要持续丰富其通信接口与协议,从而保证系统内、外正常通信。以某电视跟踪系统为例,该系统内部通信模块主要包括接口板、DM8168核心板、TVP5158扩展板,接口板与高清视频采集终端、鼠标、显示器等进行链接,接口板与DM8618核心板之间通过串口进行连接。DM8168核心板的浮点计算功能可以提高视频、音频等信号处理速度,使信号传输更加稳定,由于该核心板能够支持不同标准的多通道视频编解码,从而便于电视跟踪系统的通信单元的拓展。电视跟踪系统技术分析及常见...