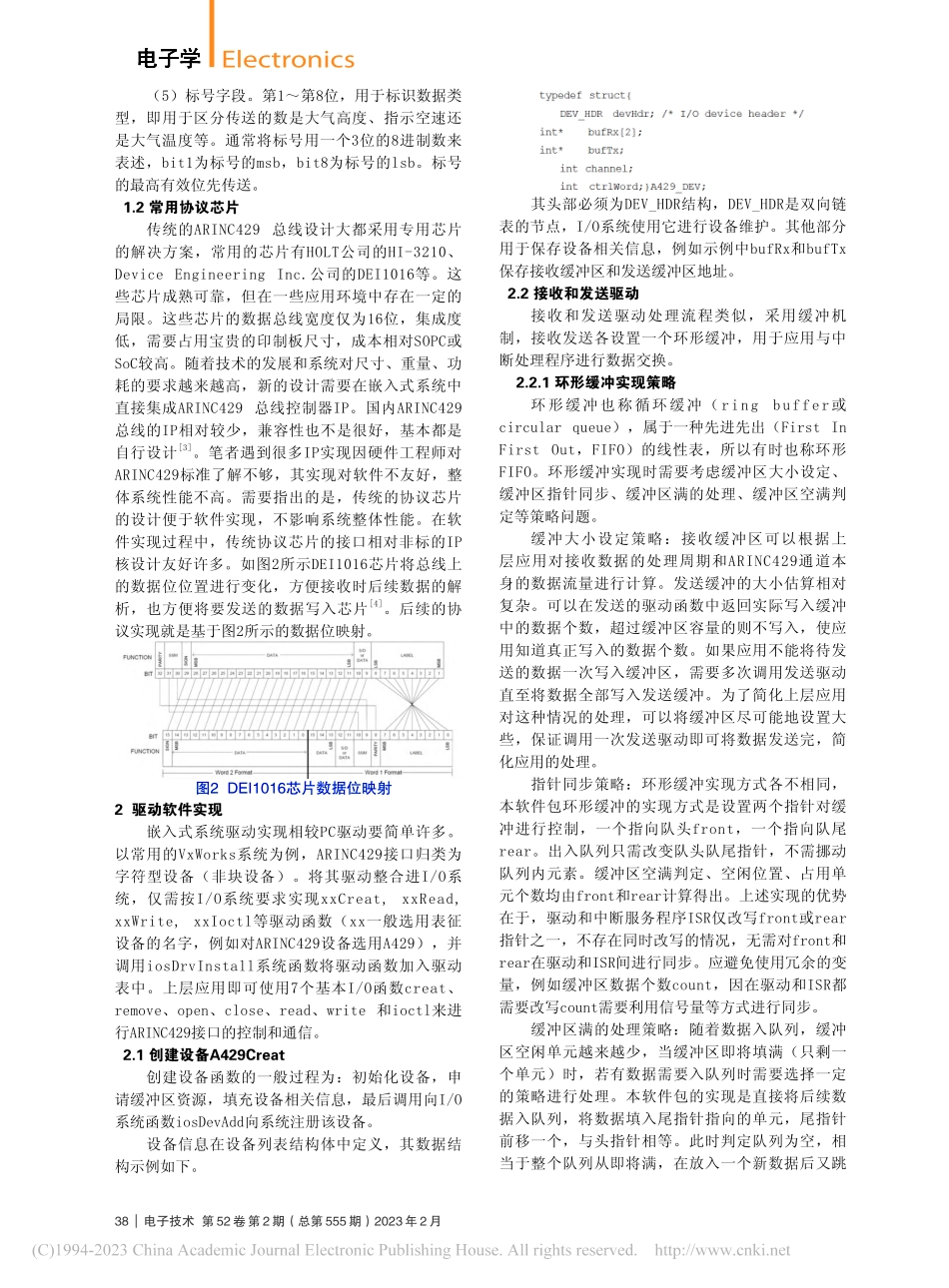
电子技术第52卷第2期(总第555期)2023年2月37Electronics电子学0引言ARINC429是商用飞机和运输机中运用最广泛的总线[1],最初版本是在1977~1978年间由AECC(AirlinesElectronicEngineeringCommittee)提出,最早运用在B757/B767和AirbusA300、A310等机型上。ARINC429是一种简单的点对点协议,它通过双绞线将机载设备连接在一起,以速度慢、电缆重量为代价换取高可靠性。作为一种历史悠久的总线,其传输数据的速率在现今看起来偏低,但因其在可靠性及成本方面的优势至今依然有顽强的生命力,在各种新型的飞机上依旧可以看到它的身影。国内参考ARINC429标准也提出了相应的航标,其编号为HB6096,现今仍在国内的各种飞机上广泛应用。本文对ARINC429标准的常用概念给出了清晰描述,提出了一套典型的包含驱动和通信协议的软件实现。此实现在多个项目中已推广使用,移植方便,简单可靠。1ARINC429总线1.1数据格式一个ARINC429数据字通常为32位,分为校验(Parity)、符号状态矩阵(Sign/StatusMatrix,SSM)、数据位(Data)、源目的指示(SDI)和标号(Label)等5个字段。图1是位1~位32与各字段对应关系。标准对上述字段有较详细的规定或建议的使用方式。而且ARINC429相关标准对各种数据传输的单位、范围、分辨率、更新频率、数据有效位、填充位等有详细的定义,可以查找标准[2]参考使用。(1)校验字段。第32位为校验位,ARINC429采用奇校验,即通过将第32位的校验位清0或置1保证发送的32位数据包含奇数个1。(2)符号状态矩阵字段。第30~31位为符号/状态字段,用于表示设备状态(故障/正常)、工作方式或数据状态(有效/非计算数据/故障告警/功能测试等);在以BCD方式传送数据时,还可用于表示数据的符号(例如南纬/北纬、东经/西经、向右倾斜/向左倾斜等)。当SSM用于传送状态且有多个状态同时存在时,状态采用优先级来排序,优先设置高优先级状态。常用的状态和优先级见表1。(3)数据字段。第11~29位为数据字段。(4)源目的指示字段。第9~10位,在有多个接收器时用于标志接收器。有时也与第11~29位一起用作数据位,如图1所示。作者简介:文圣丰,中国航空工业集团公司西安航空计算技术研究所;研究方向:机载嵌入式软件。收稿日期:2022-10-14;修回日期:2023-02-12。摘要:阐述ARINC429总线的特点,ARINC429总线软件实现过程中的问题,机载嵌入式平台下ARINC429从驱动软件和上层通信协议的一种通用实现方法。关键词:ARINC429,嵌入式,...