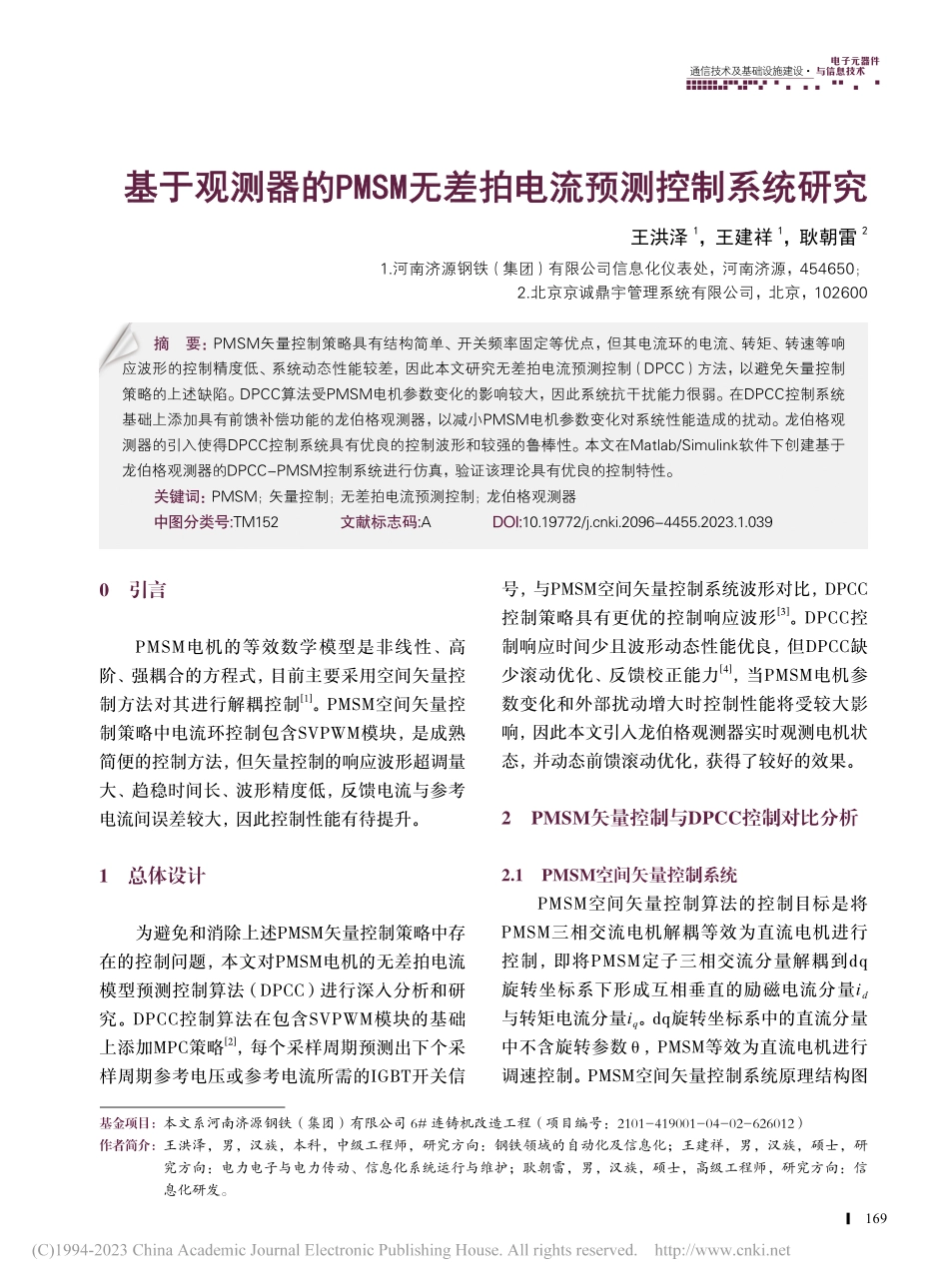
电子元器件与信息技术|169通信技术及基础设施建设·基于观测器的PMSM无差拍电流预测控制系统研究王洪泽1,王建祥1,耿朝雷21.河南济源钢铁(集团)有限公司信息化仪表处,河南济源,454650;2.北京京诚鼎宇管理系统有限公司,北京,102600摘要:PMSM矢量控制策略具有结构简单、开关频率固定等优点,但其电流环的电流、转矩、转速等响应波形的控制精度低、系统动态性能较差,因此本文研究无差拍电流预测控制(DPCC)方法,以避免矢量控制策略的上述缺陷。DPCC算法受PMSM电机参数变化的影响较大,因此系统抗干扰能力很弱。在DPCC控制系统基础上添加具有前馈补偿功能的龙伯格观测器,以减小PMSM电机参数变化对系统性能造成的扰动。龙伯格观测器的引入使得DPCC控制系统具有优良的控制波形和较强的鲁棒性。本文在Matlab/Simulink软件下创建基于龙伯格观测器的DPCC-PMSM控制系统进行仿真,验证该理论具有优良的控制特性。关键词:PMSM;矢量控制;无差拍电流预测控制;龙伯格观测器中图分类号:TM152文献标志码:ADOI:10.19772/j.cnki.2096-4455.2023.1.0390引言PMSM电机的等效数学模型是非线性、高阶、强耦合的方程式,目前主要采用空间矢量控制方法对其进行解耦控制[1]。PMSM空间矢量控制策略中电流环控制包含SVPWM模块,是成熟简便的控制方法,但矢量控制的响应波形超调量大、趋稳时间长、波形精度低,反馈电流与参考电流间误差较大,因此控制性能有待提升。1总体设计为避免和消除上述PMSM矢量控制策略中存在的控制问题,本文对PMSM电机的无差拍电流模型预测控制算法(DPCC)进行深入分析和研究。DPCC控制算法在包含SVPWM模块的基础上添加MPC策略[2],每个采样周期预测出下个采样周期参考电压或参考电流所需的IGBT开关信号,与PMSM空间矢量控制系统波形对比,DPCC控制策略具有更优的控制响应波形[3]。DPCC控制响应时间少且波形动态性能优良,但DPCC缺少滚动优化、反馈校正能力[4],当PMSM电机参数变化和外部扰动增大时控制性能将受较大影响,因此本文引入龙伯格观测器实时观测电机状态,并动态前馈滚动优化,获得了较好的效果。2PMSM矢量控制与DPCC控制对比分析2.1PMSM空间矢量控制系统PMSM空间矢量控制算法的控制目标是将PMSM三相交流电机解耦等效为直流电机进行控制,即将PMSM定子三相交流分量解耦到dq旋转坐标系下形成互相垂直的励磁电流分量id与转矩电流分量iq。dq旋转坐标系中的直流分量中不含旋转参数θ,PMSM等效为直流电机进行调速控制。PMSM空...