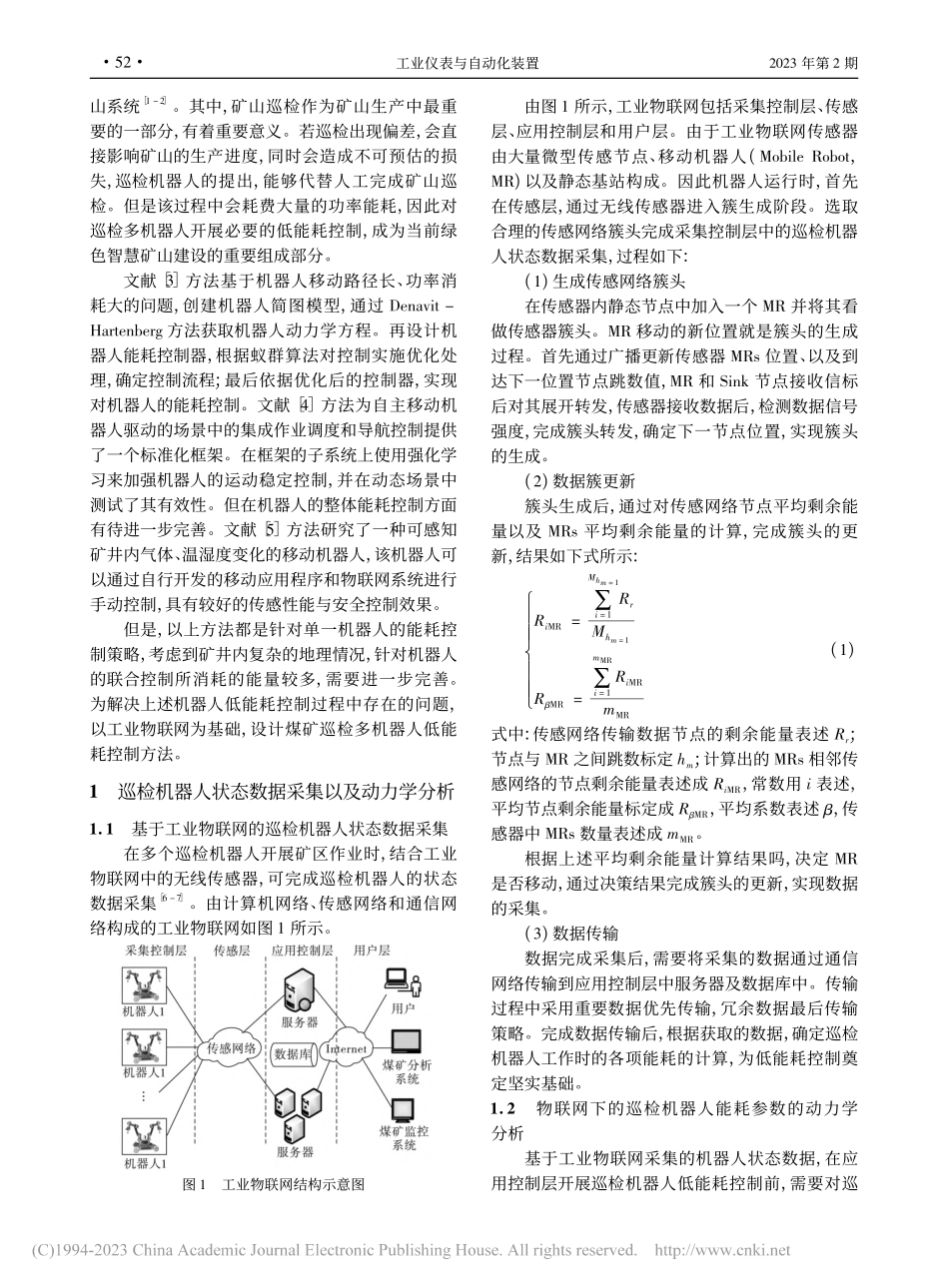
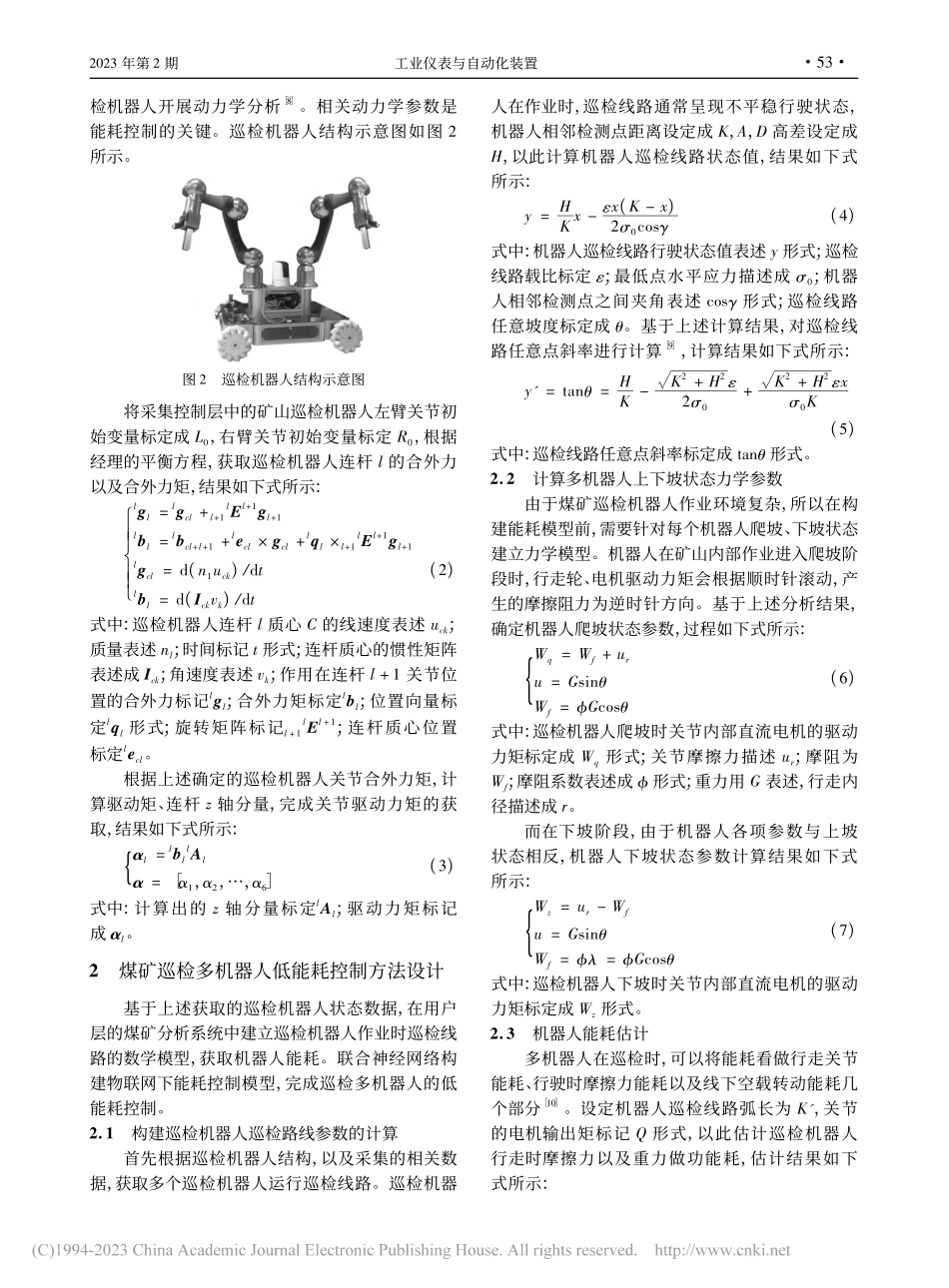
收稿日期:2022-10-09基金项目:山西省基础研究计划项目:晃动基座下掘进装备捷联惯导系统对准方法研究(202103021223461)第一作者:陈宁(1987—),男,汉族,河南叶县人,硕士,助理研究员,研究方向为煤矿装备电气、智能化。基于工业物联网的煤矿巡检多机器人低能耗控制陈宁(中国煤炭科工集团太原研究院有限公司,山西太原030006)摘要:在复杂地形的煤矿巡检中,针对多个机器人联合控制过程中能耗较高问题,对多机器的联合控制方法逐渐成为可能。提出基于工业物联网的煤矿巡检多机器人低能耗控制方法。通过工业物联网中的无线传感器采集多个机器人的状态数据,利用物联网特征开展机器人的联合动力学分析,确定不同机器人运动时的驱动力矩,并以此计算每个机器人作业时的相关能耗值。根据能耗值制定机器人最低能耗约束条件,利用递归模糊神经网络计算能耗值,可以提高能耗值非线性求解的速率。将计算的数值输入到构建的巡检能耗控制模型,完成巡检机器人的低能耗控制。测试实验结果表明:对比蚁群优化算法和强化学习方法,使用该方法控制巡检多机器人时,30s内上坡、下坡移动速度均低于10m/s。在200unit范围时,移动步数可达39mm,能耗控制效果较好。关键词:工业物联网;数据采集;煤矿巡检机器人;低能耗控制方法中图分类号:TP242文章编号:1000-0682(2023)02-0051-06文献标识码:ADOI:10.19950/j.cnki.cn61-1121/th.2023.02.010Multi-robotlowenergyconsumptioncontrolforcoalmineinspectionbasedonIndustrialInternetofThingsCHENNing(TaiyuanInstituteofChinaCoalTechnologyandEngineeringGroup,ShanxiTaiyuan030006,China)Abstract:Intheinspectionofcoalmineswithcomplexterrain,inviewoftheproblemofhighenergyconsumptionintheprocessofmultirobotjointcontrol,thejointcontrolmethodformultiplemachineshasgraduallybecomepossible.AlowenergyconsumptioncontrolmethodbasedonindustrialInternetofThingsforcoalmineinspectionmultirobotisproposed.ThestatedataofmultiplerobotsarecollectedthroughwirelesssensorsintheindustrialInternetofThings,andthejointdynamicanalysisofrobotsiscarriedoutusingthecharacteristicsoftheInternetofThingstodeterminethedrivingtorqueofdifferentrobotswhenmoving,andthentherelevantenergyconsumptionvalueofeachrobotwhenworkingiscalcu-lated.Accordingtotheenergyconsumptionvalue...