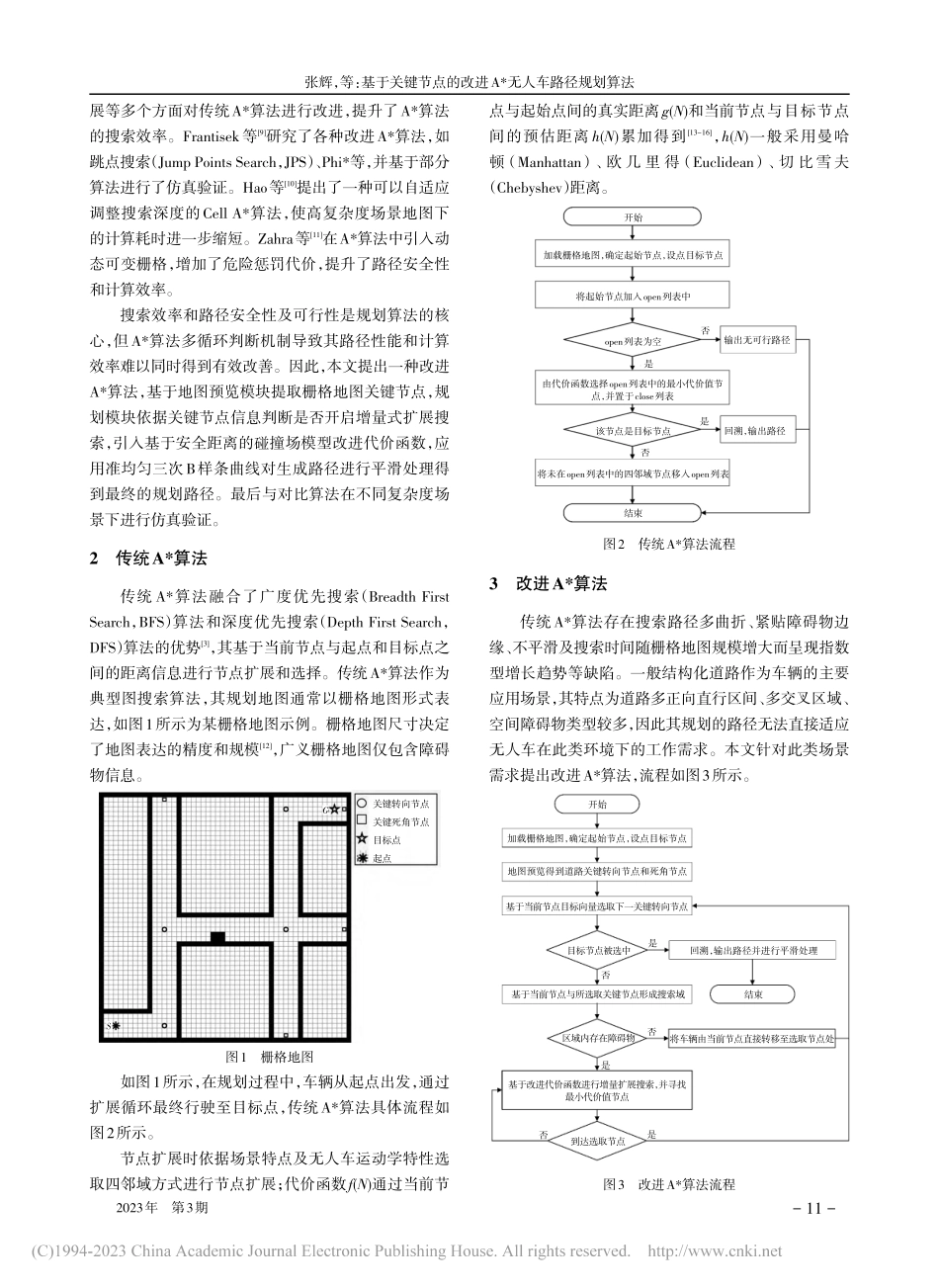
汽车技术【摘要】针对传统A*算法在结构化道路场景下进行无人车路径规划时存在搜索路径多曲折、紧贴障碍物边界、不平滑及搜索时间随栅格规模增大而呈现指数型增长趋势等缺陷,提出一种改进A*算法,首先应用地图预览模块提取栅格地图关键节点,同时引入基于安全距离的碰撞场模型改进代价函数,基于关键节点信息判断开启增量扩展搜索,直至搜索到目标节点,最后应用准均匀三次B样条曲线对生成路径进行平滑得到最终的规划路径。仿真结果表明,与传统A*算法和Weighted-A*算法相比,改进A*算法提高了搜索效率,改善了路径的安全性和可行性。主题词:路径规划A*算法关键节点碰撞场模型中图分类号:TP301.6文献标识码:ADOI:10.19620/j.cnki.1000-3703.20220144KeyNodes-BasedImprovedA*AlgorithmforPathPlanningofUnmannedVehicleZhangHui1,ZhangRuiliang1,2,XuXiaoqing1,FanZhengwu1,2(1.TaiyuanUniversityofTechnology,Taiyuan030024;2.ShanxiAutomotiveDesignEngineeringTechnologyResearchCenter,Taiyuan030024)【Abstract】ForthedefectsoftraditionalA*algorithminunmannedvehiclepathplanninginstructuredroadscene,suchasmultipletwistsandturnsofsearchpath,closetoobstacleboundary,unsmoothandexponentialgrowthtrendofsearchtimewiththeincreaseofgridscale,thispaperproposedanimprovedA*algorithm.Firstly,themappreviewmodulewasusedtoextractthekeynodesinthegridmap,thenthecollisionfieldmodelbasedonthesafedistancewasintroducedtoadjustthecostfunction.Thealgorithmconductedincrementalextendedsearchbasedontheinformationofkeynodesuntilthetargetnodewasidentified.Finally,thegeneratedpathwassmoothedbyquasiuniformcubicB-splinecurvetoobtainthefinalplannedpath.ThesimulationresultsshowthatcomparedwiththetraditionalA*andweighted-A*algorithm,theimprovedA*algorithmproposedinthispaperimprovesthesearchefficiency,pathsecurityandfeasibility.Keywords:Pathplanning,A*algorithm,Keynode,Collisionfieldmodel张辉1张瑞亮1,2许小庆1范政武1,2(1.太原理工大学,太原030024;2.山西省汽车设计工程技术研究中心,太原030024)通讯作者:张瑞亮(1977—),博士,教授,主要研究方向为智能驾驶汽车系统研发、专用车设计与开发,rl_zhang@163.com。基于关键节点的改进A*无人车路径规划算法汽车技术·AutomobileTechno...