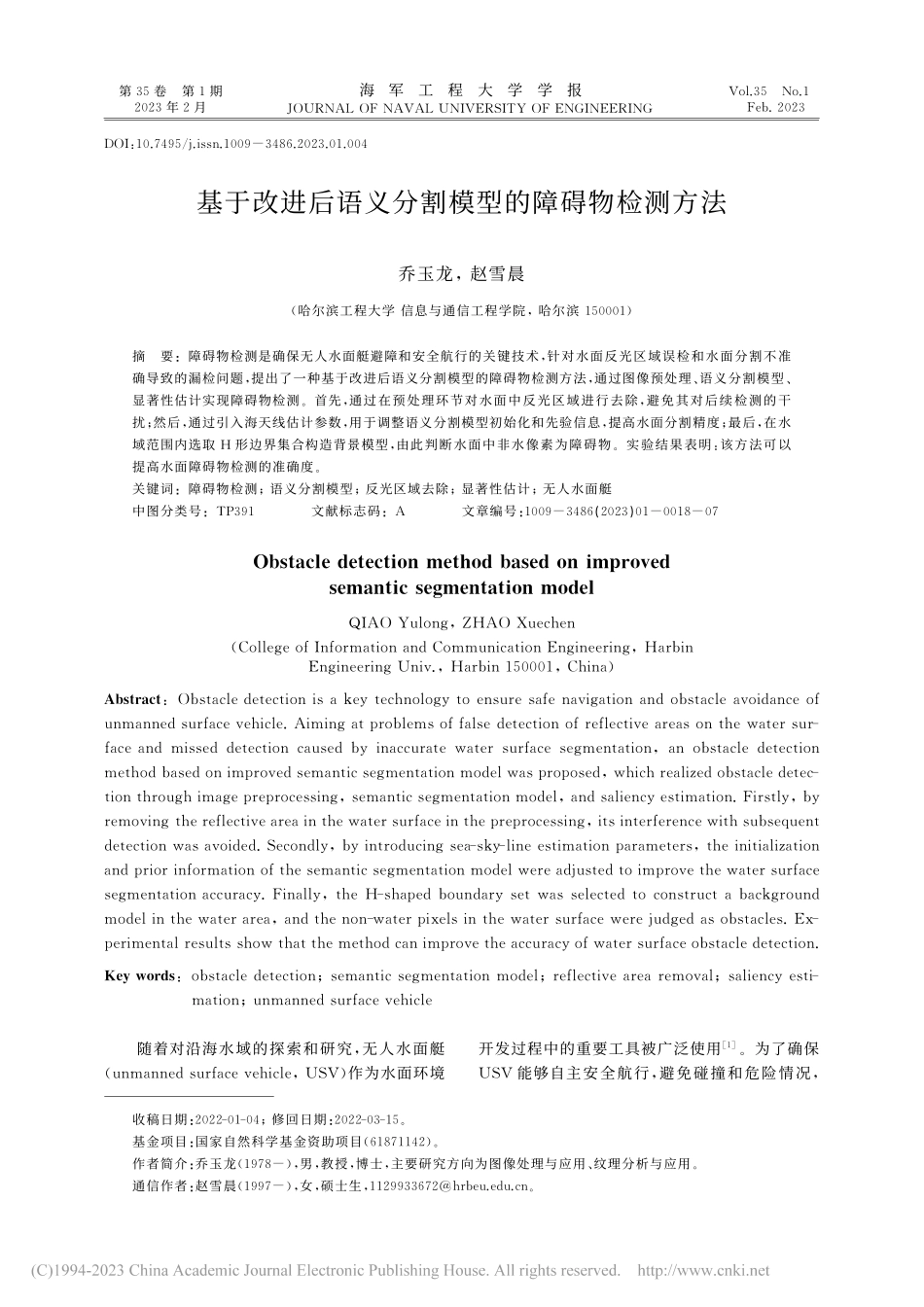
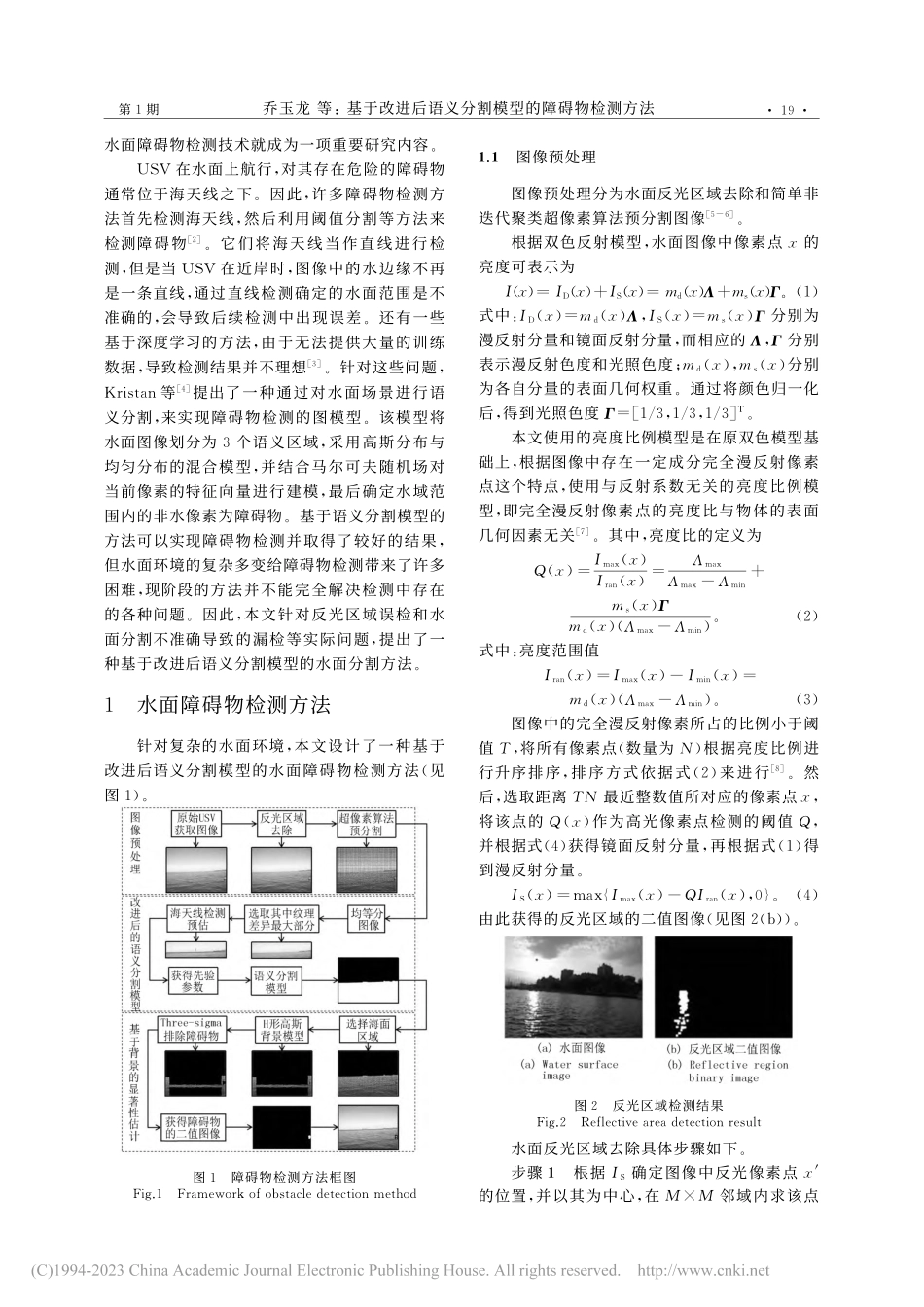
DOI:10.7495/j.issn.1009-3486.2023.01.004基于改进后语义分割模型的障碍物检测方法收稿日期:2022-01-04;修回日期:2022-03-15。基金项目:国家自然科学基金资助项目(61871142)。作者简介:乔玉龙(1978-),男,教授,博士,主要研究方向为图像处理与应用、纹理分析与应用。通信作者:赵雪晨(1997-),女,硕士生,1129933672@hrbeu.edu.cn。乔玉龙,赵雪晨(哈尔滨工程大学信息与通信工程学院,哈尔滨150001)摘要:障碍物检测是确保无人水面艇避障和安全航行的关键技术,针对水面反光区域误检和水面分割不准确导致的漏检问题,提出了一种基于改进后语义分割模型的障碍物检测方法,通过图像预处理、语义分割模型、显著性估计实现障碍物检测。首先,通过在预处理环节对水面中反光区域进行去除,避免其对后续检测的干扰;然后,通过引入海天线估计参数,用于调整语义分割模型初始化和先验信息,提高水面分割精度;最后,在水域范围内选取H形边界集合构造背景模型,由此判断水面中非水像素为障碍物。实验结果表明:该方法可以提高水面障碍物检测的准确度。关键词:障碍物检测;语义分割模型;反光区域去除;显著性估计;无人水面艇中图分类号:TP391文献标志码:A文章编号:1009-3486(2023)01-0018-07ObstacledetectionmethodbasedonimprovedsemanticsegmentationmodelQIAOYulong,ZHAOXuechen(CollegeofInformationandCommunicationEngineering,HarbinEngineeringUniv.,Harbin150001,China)Abstract:Obstacledetectionisakeytechnologytoensuresafenavigationandobstacleavoidanceofunmannedsurfacevehicle.Aimingatproblemsoffalsedetectionofreflectiveareasonthewatersur-faceandmisseddetectioncausedbyinaccuratewatersurfacesegmentation,an...