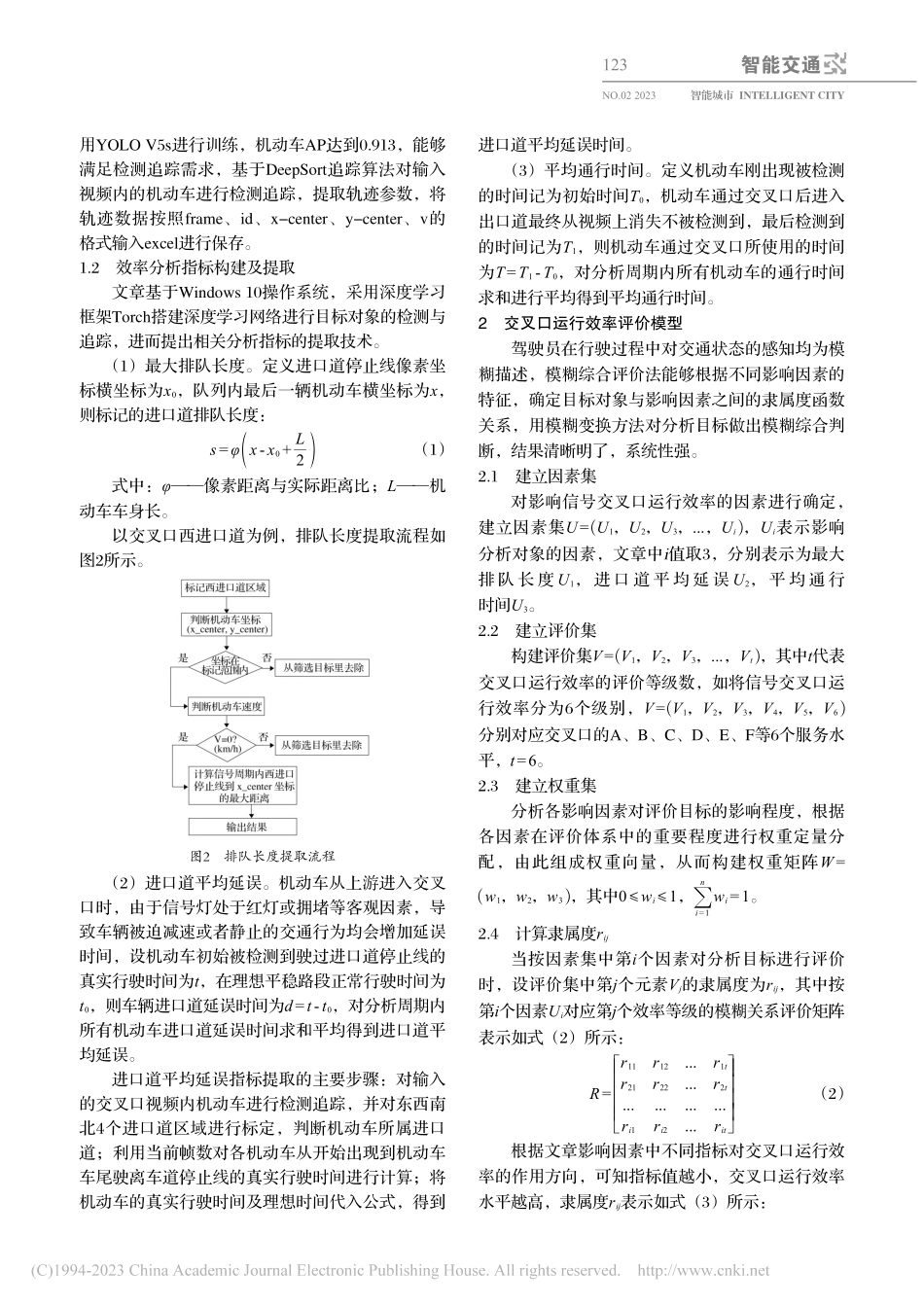
智能交通NO.022023122智能城市INTELLIGENTCITY基于机器视觉的信号交叉口运行效率分析模型沈呈龙汤睿尧田晓芳(南京理工大学,江苏南京210094)摘要:为了客观分析城市道路信号交叉口运行效率,文章基于机器视觉选取YOLOV5s与DeepSort的多目标追踪算法对信号交叉口机动车进行检测追踪,获取运行轨迹及运动参数等交通信息,在此基础上从空间、时间及受阻状况三方面提出排队长度、平均通行时间和进口道平均延误的提取方法,将最大排队长度、进口道平均延误、平均通行时间共三个交通参数作为分析指标建立模糊综合评价模型对信号交叉口运行效率进行分析,选取南京市信号交叉口实例对模型进行验证。结果表明,模型成果能够有效测度信号交叉口运行效率,对信号交叉口运行效率水平的提升提供了一定的技术支持。关键词:机器视觉;排队长度;进口道平均延误;平均通行时间;运行效率;模糊综合评价中图分类号:U491文献标识码:A文章编号:2096-1936(2023)02-0122-04DOI:10.19301/j.cnki.zncs.2023.02.036现阶段研究者倾向于多指标融合对交叉口运行效率进行综合评价。Dakic等[1]提出了连续周期平均绿灯到达车辆数比、方向延误和绿灯到达车辆数比对交叉口运行效率进行分析。Datta等[2]选取饱和度、停车率和服务延误对无信号交叉口运行性能进行分析。此类评价指标体系比较完善,但同步获取难度较大,数据来源基本来自实测小样本数据,存在一定的主观性偏差。随着机器视觉的兴起,基于机器视觉对城市道路交通参数获取逐渐成为交通领域重要手段之一。Zhou等[3]提出一种计算机视觉框架,可从监控视频中提取交通量等信息对交叉口信号配时进行优化。Jodoin等[4]利用背景差分法构建特征点和空间信息的目标模型,可以实现对机动车速度等信息进行提取。Azimjonov等[5]开发了一种基于边界框的车辆检测跟踪系统,能够对高速公路中的交通流进行统计计数。郑来等[6]基于单目视觉技术,构建了静态间距测算模型,能够对静止状态下队列内机动车间距进行测算。刘新平等[7]通过视频分析技术,结合车辆角点特征对拥堵状态下的车辆排队长度进行检测。王昊等[8]基于双目视觉提出了一种能够实时感知车辆跟驰状态的系统,能够对跟驰距离、速度差等参数进行实时估计。目前基于机器视觉的信号交叉口运行效率分析主要集中于车辆的某个或某些参数,在信号交叉口运行效率研究方面尚未提出一套较为完整的分析体系。基于此,文章以无人机视频数据为基础,采用机器视觉对机动车交通参数进...