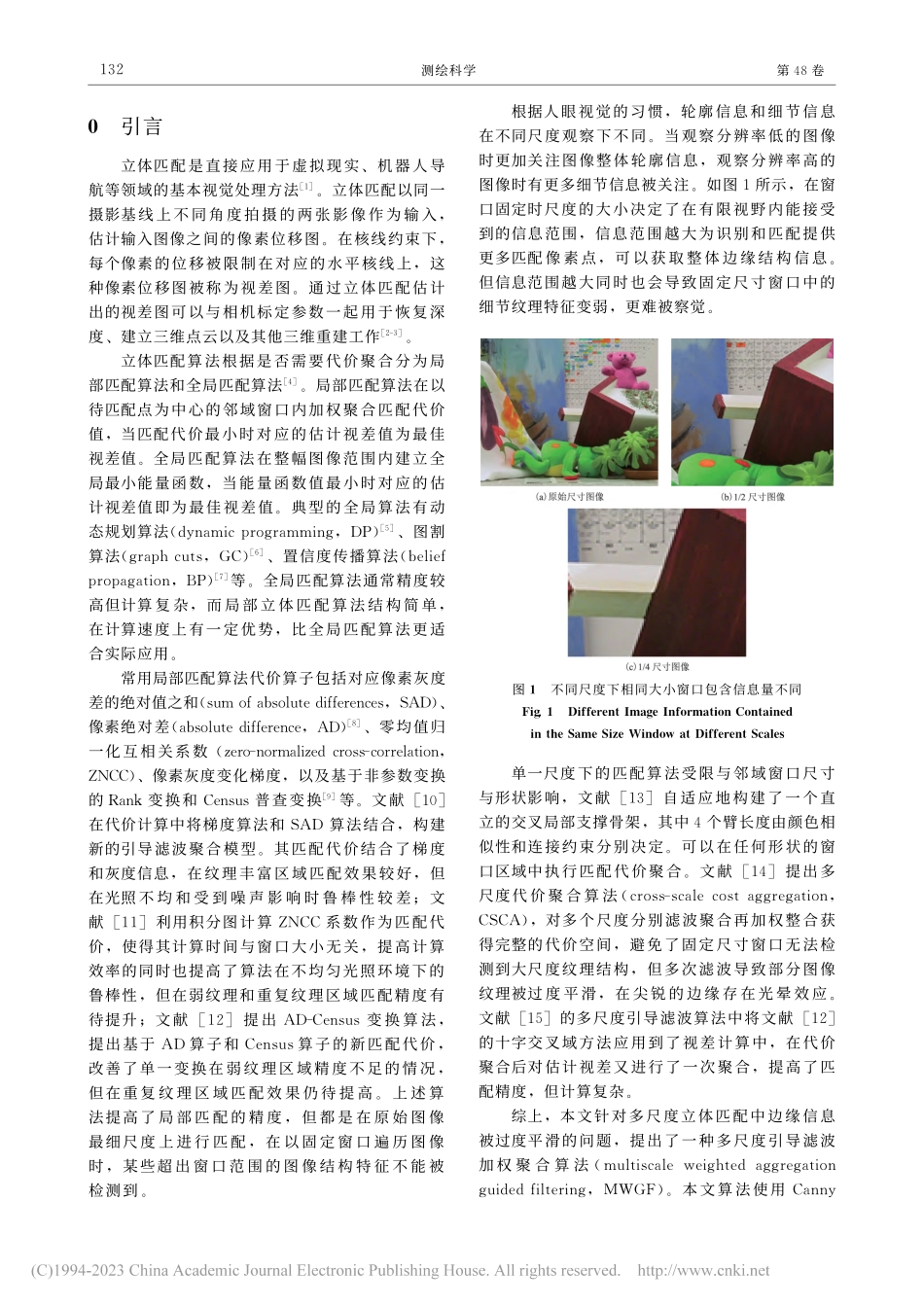
第48卷第2期2023年2月测绘科学ScienceofSurveyingandMappingVol.48No.2Feb.2023作者简介:向玺蒙(1996—),男,四川达州人,硕士研究生,主要研究方向为双目视觉立体匹配。E-mail:1347304058@qq.com收稿日期:2022-05-26基金项目:国家自然科学基金面上项目(41871379);辽宁省兴辽英才计划项目(XLYC2007026);辽宁省应用基础研究计划项目(2022JH2/101300273)通信作者:王竞雪教授E-mail:xiaoxue1861@163.com引文格式:向玺蒙,王竞雪.多尺度引导滤波加权聚合的立体匹配算法[J].测绘科学,2023,48(2):131-139.(XIANGXimeng,WANGJingxue.Stereomatchingalgorithmofmulti-scaleguidedfilterweightedaggregation[J].ScienceofSurveyingandMapping,2023,48(2):131-139.)DOI:10.16251/j.cnki.1009-2307.2023.02.017.多尺度引导滤波加权聚合的立体匹配算法向玺蒙,王竞雪(辽宁工程技术大学测绘与地理科学学院,辽宁阜新123000)摘要:针对多尺度局部匹配中出现边缘信息被过度平滑导致误匹配的现象,该文利用图像多尺度信息,提出多尺度引导滤波加权聚合的立体匹配算法以提高匹配精度。在代价计算阶段,改进了Census方法,并结合图像多尺度特征信息,融合绝对差值算子和零均值归一化算子,获取稳定的初始匹配代价。在代价聚合阶段,根据图像多尺度信息构建多尺度模型,在多尺度模型中引入邻域方差,提高多尺度模型的边缘保持能力,提高视差图质量。实验结果表明,该文利用图像的多尺度信息可以更好地对图像特征进行匹配,相比单尺度引导滤波算法以及传统多尺度算法整体匹配精度有明显提高,且在非边缘区域视差过渡更加平滑,验证该文提出的多尺度立体匹配算法的可行性。关键词:立体匹配;多尺度加权聚合;引导滤波;边缘保持【中图分类号】P237【文献标志码】A【文章编号】1009-2307(2023)02-0131-09Stereomatchingalgorithmofmulti-scaleguidedfilterwe...