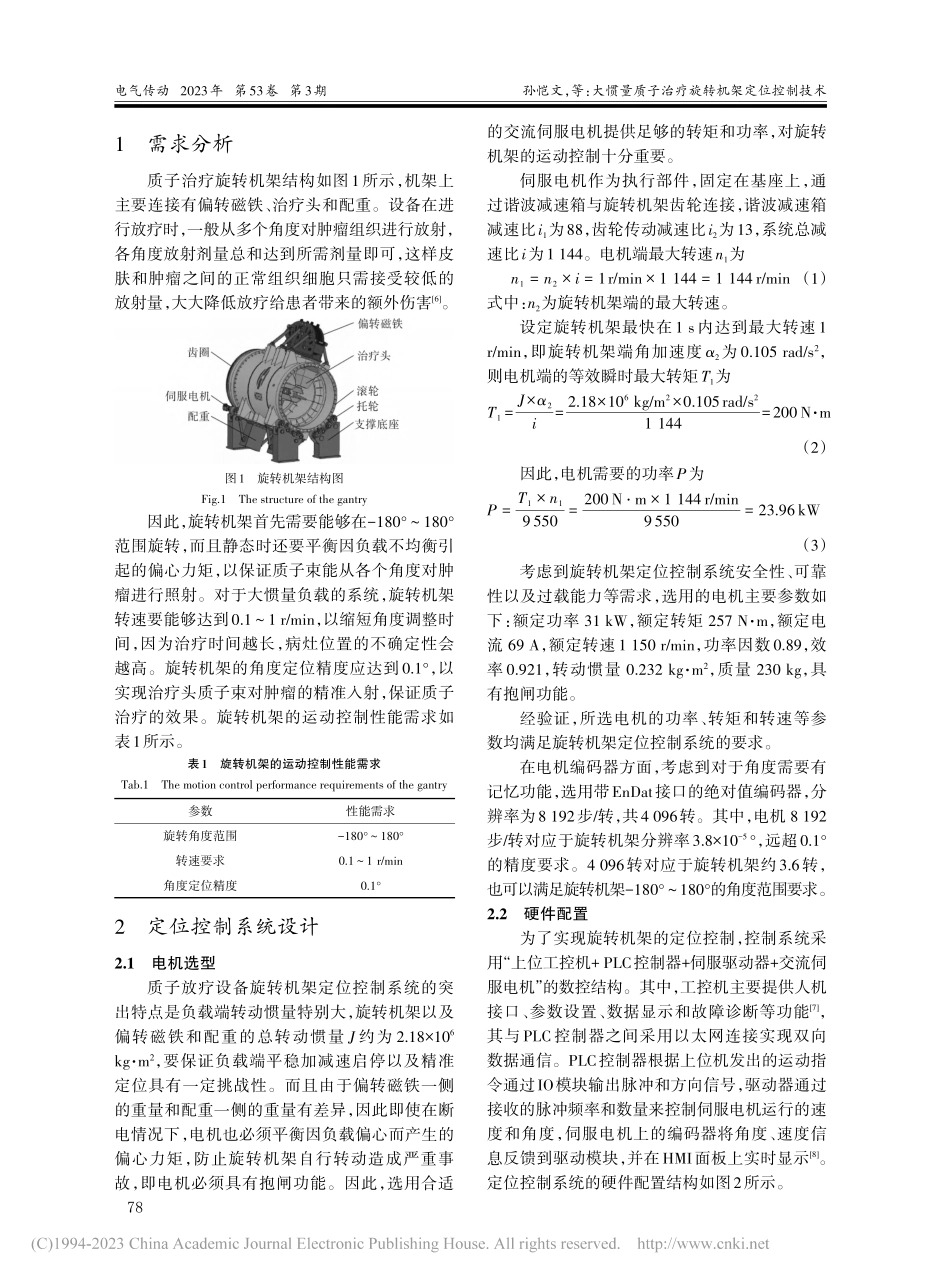
电气传动2023年第53卷第3期ELECTRICDRIVE2023Vol.53No.3摘要:旋转机架是质子放疗设备的重要组成部分,其主要特点是质量大、尺寸大、转动惯量大,运行时需要保证机架平稳加减速启停及精准定位。针对旋转机架的定位控制需求,对控制系统的硬件、软件部分进行了选型、设计,研究了系统的控制模型,并进行了参数整定,开发了一套基于PLC的质子治疗旋转机架定位控制系统。现场试验结果表明:开发的质子治疗旋转机架定位控制系统能够保证旋转机架在-180°~180°角度范围、转速1r/min的条件下,角度定位精度达到0.0113°,满足质子放疗设备的工作要求。关键词:质子放疗设备;大惯量负载;旋转机架;定位控制中图分类号:TM28文献标识码:ADOI:10.19457/j.1001-2095.dqcd24023PositioningControlTechnologyofLargeInertiaGantryforProtonRadiotherapySUNKaiwen,GONGShihua,CAIJunqiong(SchoolofMechanicalScienceandEngineering,HuazhongUniversityofScienceandTechnology,Wuhan430074,Hubei,China)Abstract:Gantryisanimportantpartofprotonradiotherapyequipment.Itsmainfeaturesareitslargemass,largesizeandlargemomentofinertia.Itisnecessarytoensurethesmoothaccelerationanddecelerationandprecisepositioningofthegantry.Inresponsetothepositioningcontrolrequirementsofthegantry,thehardwareandsoftwarepartsofthecontrolsystemwereselectedanddesigned,thecontrolmodelofthesystemwasstudied,theparameterswereadjusted,andaPLC-basedprotontherapygantrypositioningcontrolsystemwasdeveloped.Fieldtestresultsshowthatthedevelopedprotontherapygantrypositioningcontrolsystemcanensurethatthegantryhasanangularpositioningaccuracyof0.0113°undertheconditionsofananglerangeof-180°~180°andarotationspeedof1r/min,whichsatisfiestheworkrequirementsforprotonradiotherapyequipment.Keywords:protonradiotherapyequipment;largeinertiaload;gantry;positioningcontrol基金项目:国家重点研发计划(2016YFC0105306);湖北省重点研发计划项目(2021BCD005)作者简介:孙恺文(1998—),男,硕士,Email:kevinsun101@hust.edu.cn通讯作者:龚时华(1968—),男,博士,教授,Email:gongshihua1@mail.hust.edu.cn大惯量质子治疗旋转机架定位控制技术孙恺文,龚时华,蔡俊琼(华中科技大学机械科学与工程学院...