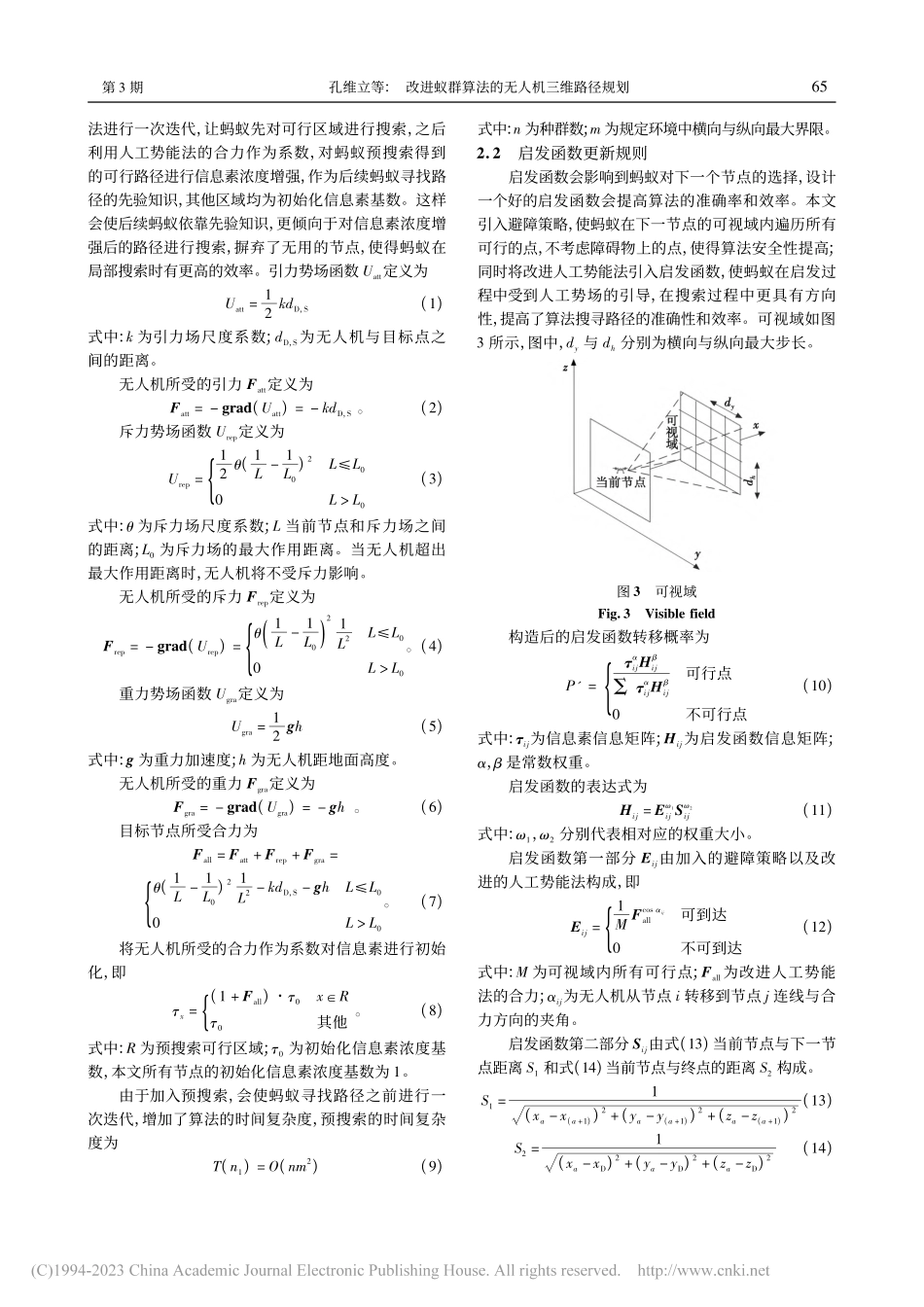
引用格式:孔维立,王峰,周平华,等.改进蚁群算法的无人机三维路径规划[J].电光与控制,2023,30(3):63-69.KONGWL,WANGF,ZHOUPH,etal.Three-dimensionalpathplanningofUAVsbasedonimprovedantcolonyalgorithm[J].ElectronicsOptics&Control,2023,30(3):63-69.改进蚁群算法的无人机三维路径规划孔维立a,王峰a,周平华a,王鹤峰b(太原理工大学,a.信息与计算机学院,山西晋中030000;b.机械与运载工程学院,太原030000)摘要:针对蚁群算法在无人机三维路径规划问题中存在收敛速度慢和容易陷入局部最优的问题,提出了一种融合改进人工势场的蚁群算法。构造重力势能场,将改进人工势场的合力作为系数对预搜索可行区域内的信息素进行初始化,提出一种随机性信息素挥发因子更新机制,改进蚁群算法的启发函数和信息素更新规则,引入重力势能来模拟无人机高空飞行,并将其应用于信息素的更新。最后设置两组对比实验对比4种算法。结果表明,所提算法有效地解决了蚁群算法存在的问题,提高了算法搜索路径的效率和能力,能在不同的环境下最快地收敛到最优值,证明了该算法的适应性和有效性。关键词:无人机;三维环境;改进蚁群算法;启发函数;信息素更新规则中图分类号:TP242文献标志码:Adoi:10.3969/j.issn.1671-637X.2023.03.012Three-DimensionalPathPlanningofUAVsBasedonImprovedAntColonyAlgorithmKONGWeilia,WANGFenga,ZHOUPinghuaa,WANGHefengb(TaiyuanUniversityofTechnology,a.SchoolofInformationandComputer,Jinzhong030000;b.SchoolofMechanicalandTransportationEngineering,Taiyuan030000,China)Abstract:Aimingattheproblemsofslowconvergenceandeasytofallintolocaloptimuminthree-dimensionalpathplanningofUnmannedAerialVehicles(UAVs),thispaperpropesesanantcolonyalgorithmwithimprovedartificialpotentialfield,constructsagravitationalpotentialfield,andinitializespheromonesinthepreliminarysearchableareawiththeresultantforceofimprovedartificialpotentialfieldasacoefficient.Arandompheromonevolatilizationfactorupdatingmechanismisproposed,whichimprovestheheuristicfunctionandpheromoneupdatingrulesofantcolonyalgorithm,introducesgravitationalpotentialenergytosimulateUAVflyingathighaltitude,andappliesittopheromoneupdating.Finally,twogroupsofcomparativeexperimentsaresetuptocompar...