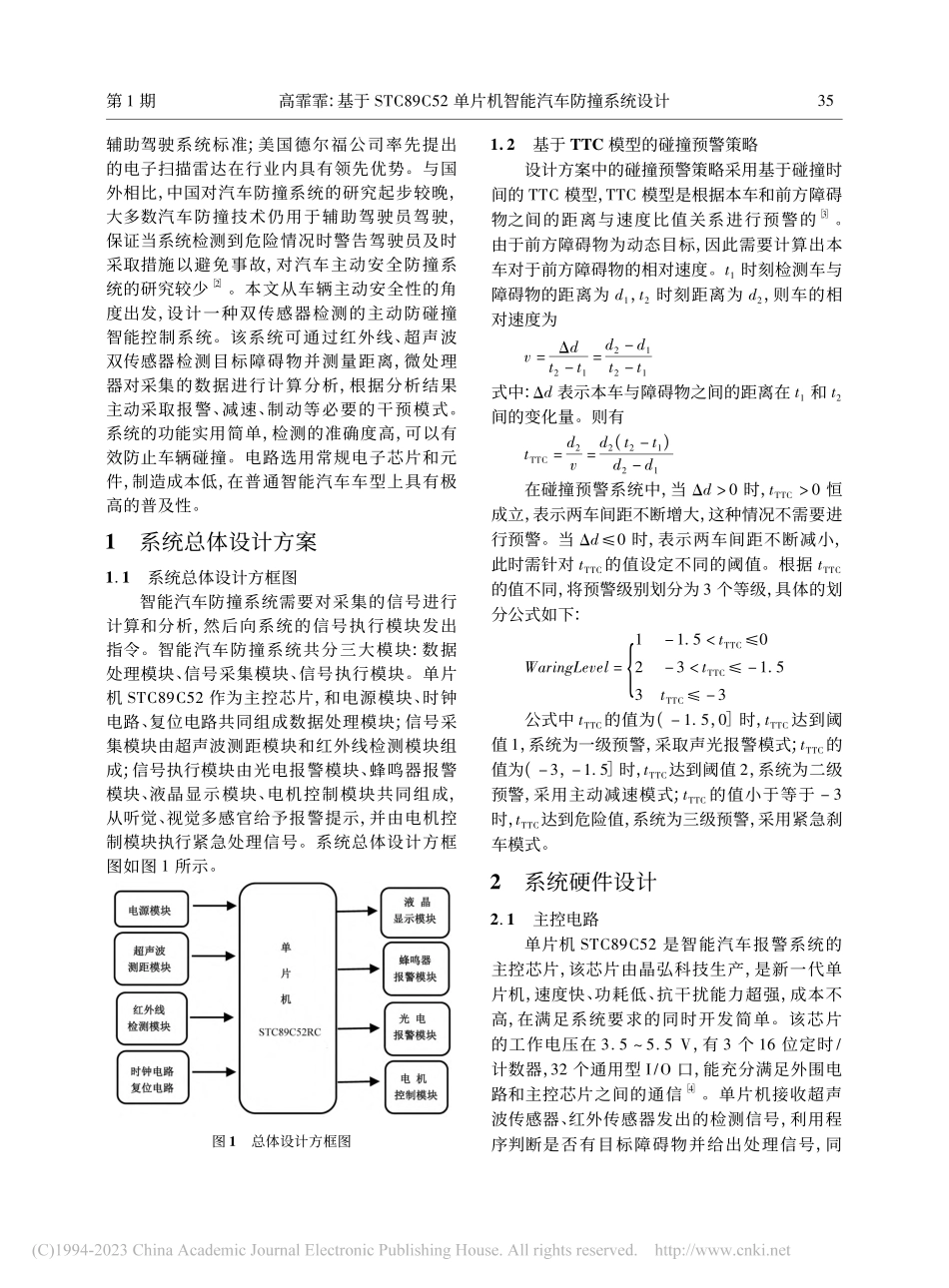
第36卷第1期2023年2月常州工学院学报JournalofChangzhouInstituteofTechnologyVol.36No.1Feb.2023doi:10.3969/j.issn.1671-0436.2023.01.007收稿日期:2022-03-28基金项目:安徽省教育厅高等学校科学研究重点项目(自然科学类)(2022AH052782);安徽省教育厅高等学校省级质量工程项目(2020jyxm2241);安徽省职业与成人教育学会教育教学研究规划课题(azcg20)作者简介:高霏霏(1983—),女,安徽宣城人,副教授,75297987@qq.com,主要研究方向为嵌入式系统设计、高等职业教育。基于STC89C52单片机智能汽车防撞系统设计高霏霏(宣城职业技术学院机械与汽车工程系,安徽宣城242000)摘要:为提高汽车智能化,保护人们的生命财产安全,智能汽车防撞系统必不可少。文章设计的汽车防撞智能系统采用单片机STC89C52为主控芯片,通过红外传感器和超声波传感器双传感器进行测距,以保障检测的精确性。当检测到物体与车的距离小于设定的阈值时,系统进行声光报警并显示距离,同时主动采取有效干预模式控制汽车减速或紧急刹车,有效防止了车辆碰撞。关键词:汽车防撞系统;单片机;超声波传感器;红外传感器中图分类号:TP277;U463.6文献标志码:A文章编号:1671-0436(2023)01-0034-06DesignofIntelligentVehicleAnti-CollisionSystemBasedonSTC89C52MCUGAOFeifei(DepartmentofMechanicalandAutomotiveEngineering,XuanchengVocational&TechnicalCollege,Xuancheng242000)Abstract:Inordertoimprovethevehicleintelligenceandprotectpeople'slifeandproperty,theintelli-gentvehicleanti-collisionsystemisessential.Theintelligentvehicleanti-collisionsystemdesignedusesSTC89C52MCUasthemaincontrolchip,andtheinfraredsensorandultrasonicsensorusedforrangingsoastoguaranteetheaccuracyofdetection.Whenthedistancebetweentheobjectandthecarisdetectedtobelessthanthesetthresholdvalue,thesystemalertsthroughsoundandlight,displayingthedistance,andatthesametime,activelytakesaneffectiveinterventionmodetocontrolthedecelerationoremergencybrakingofthevehicle,thuseffectivelypreventingvehiclecollision.Keywords:vehicleanti-collisionsystem;MCU;ultrasonicsensor;infraredsensor随着经济发展及人民群众出行需求的快速增长,中国道路交通运输行业快速发展。中国机动车保有量、驾驶人数量、道路里程持续增长。截至2021年9月,全国机...