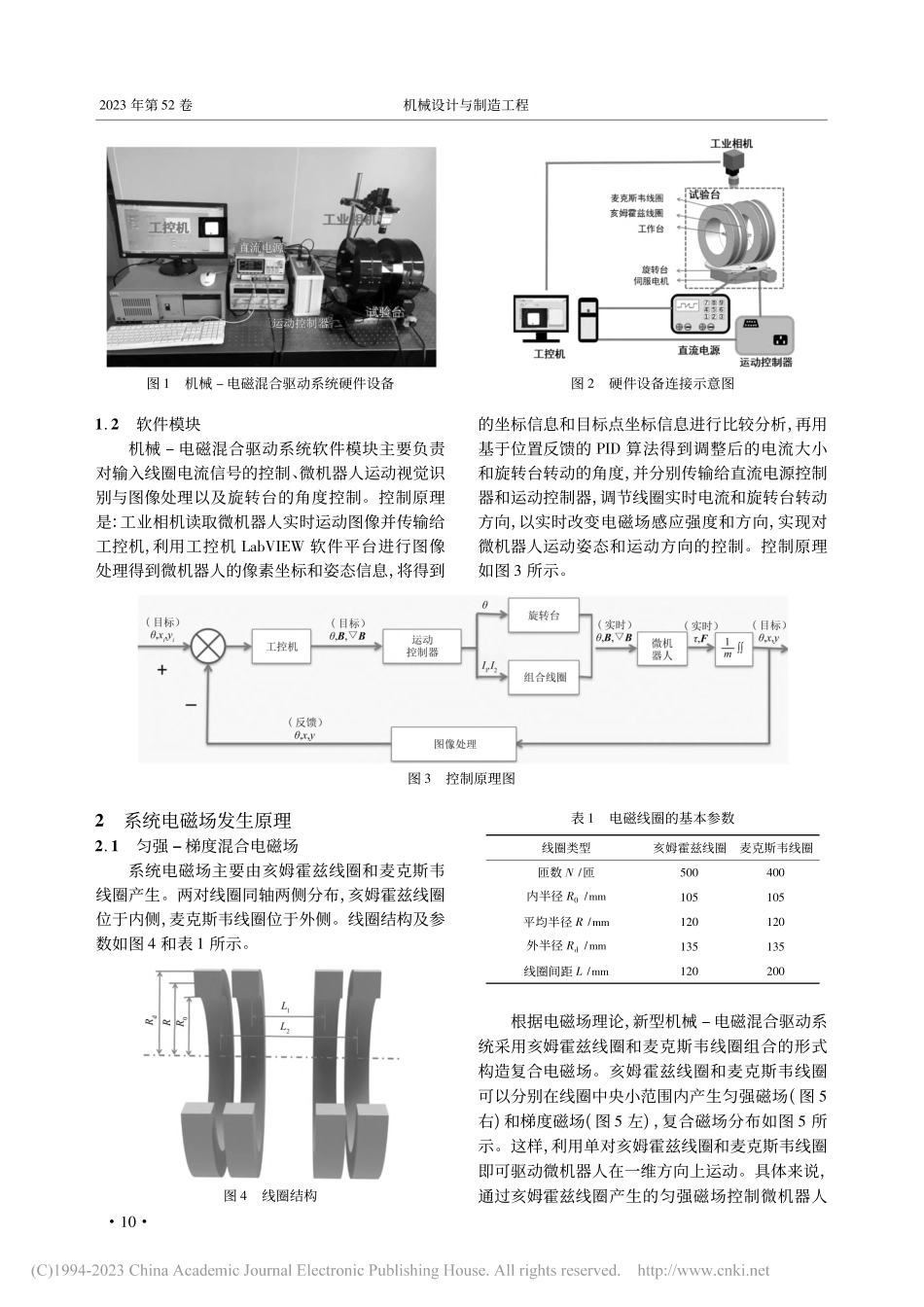
DOI:10.3969/j.issn.2095-509X.2023.02.002机械-电磁混合驱动磁控微机器人系统设计李庆伟1,徐冬秦1,牛福洲2,孙立宁1,杨浩1(1.苏州大学机电工程学院机器人与微系统研究中心,江苏苏州215137)(2.苏州科技大学机械工程学院,江苏苏州215101)摘要:设计了一种新型磁控微机器人驱动系统,采用机械-电磁混合驱动方式控制磁性微机器人在二维平面内进行任意方向的运动。对磁场发生装置和控制系统工作原理进行了详细论述,并进行了基于位置信息的自动控制实验。实验结果表明,机械-电磁混合驱动系统不仅结构简单,而且具有转向精度高、响应速度快等优点,验证了混合驱动系统的有效性,为磁控微机器人驱动系统的研制提供了新的思路。关键词:磁控微机器人;混合驱动;转向能力中图分类号:TP242文献标识码:A文章编号:2095-509X(2023)02-0009-05近年来,磁控微机器人凭借其具有微小身体尺寸、自由无缆驱动方式和精确可控等优点,成为微机器人领域研究的热点。外部可控电磁场设备是驱动磁性微机器人运动的关键设备。通过调节外部电磁场可以实现对磁性微机器人运动的无缆、精确控制。磁控微机器人应用于组织取样[1-3]、微手术[4-5]、靶向送药[6-8]等生物医学领域,取得了大量令人瞩目的成果。Kratochvil等[9]提出的Oc-toMag磁力操作系统,通过在三维空间中非对称布置8个电磁线圈产生梯度磁场,在较大空间内实现对微机器人五自由度的无线控制;Choi等[10]利用两对相互正交布置的Helmholtz线圈和Maxwell线圈产生的复合磁场对磁性微机器人在二维平面内的运动进行控制。以上两种典型的外部电磁场设备需要多组电磁线圈产生复合电磁场,这不仅使设备结构繁重,价格高昂,而且存在微机器人响应速度慢、转向精度不高等问题。为了寻求一种简单有效的外部电磁场驱动方式,本文提出了一种机械-电磁混合驱动磁控微机器人系统。1系统总体设计本文所设计的新型机械-电磁混合驱动系统分为硬件设备和软件模块两部分,系统具备以下功能:1)产生可调节的电磁场;2)驱动微机器人在二维平面内进行任意方向的运动。1.1硬件设备机械-电磁混合驱动系统硬件由试验台、直流电源、工控机、工业相机、运动控制器5部分组成,如图1所示,各部分之间的连接如图2所示。其中试验台是磁场发生平台,主要由亥姆霍兹和麦克斯韦组合线圈、工作台、旋转台及伺服电机组成。亥姆霍兹和麦克斯韦组合线圈同轴两侧分布,每对线圈均采用串联方式,以保证两线圈中的电流大小完全...