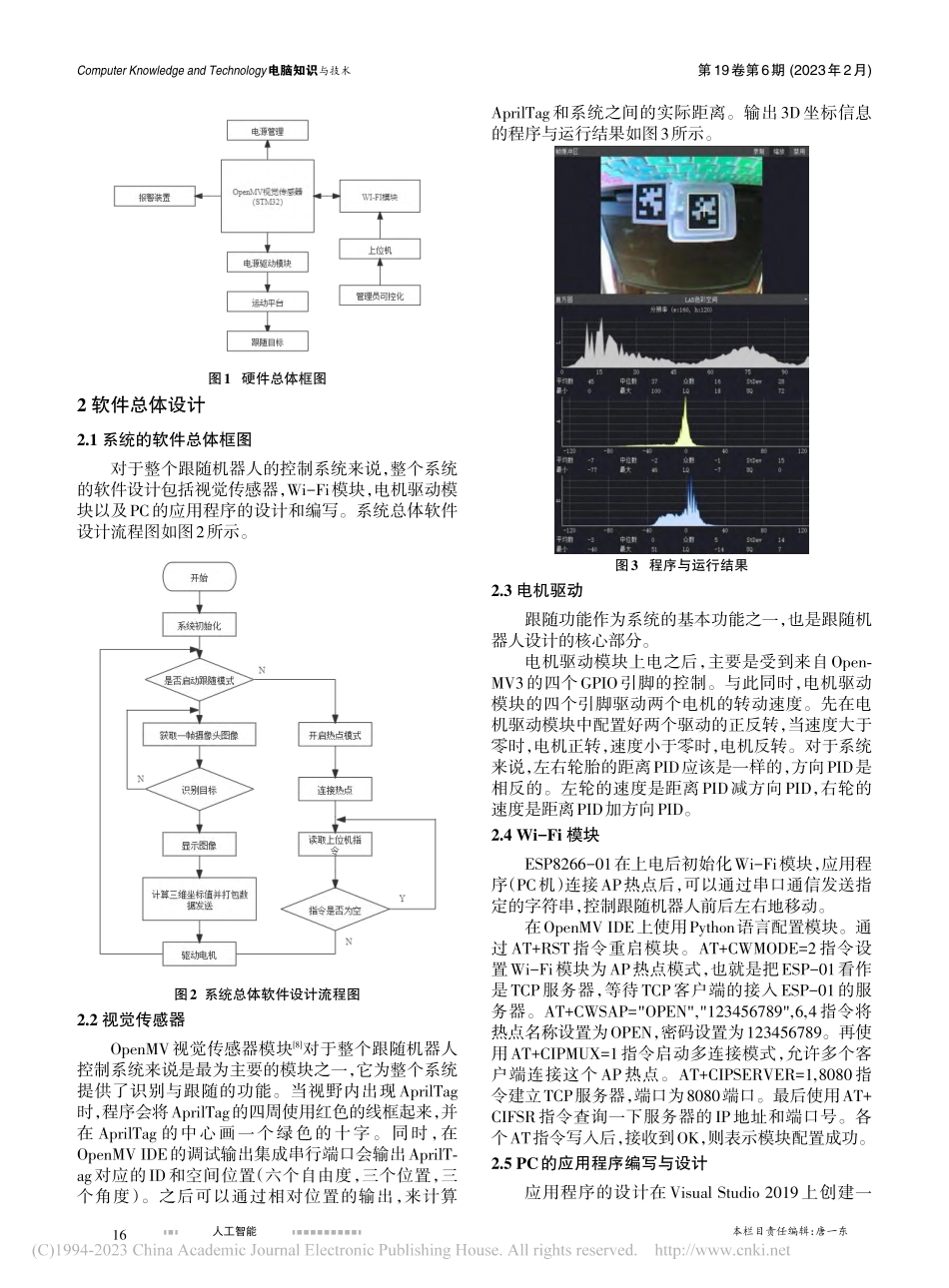
人工智能本栏目责任编辑:唐一东ComputerKnowledgeandTechnology电脑知识与技术第19卷第6期(2023年2月)基于OpenMV的特征辨识跟随机器人控制系统设计肖啸天,孙明晓,王博,栾添添(哈尔滨理工大学自动化学院,黑龙江哈尔滨150080)摘要:为了让人在超市等公共场合解放双手,减轻负重,设计一种基于OpenMV视觉摄像头模块的具有特征辨识功能的智能跟随机器人。在自主跟随模式下,系统通过识别AprilTag来确定被跟随目标与跟随机器人的相对位置坐标,运用PID算法来规划系统的跟随路径,通过调用PWM脉宽调制控制左右电机的转速,达到跟随的效果。在遥控模式下,跟随机器人可以被上位机遥控,借助应用程序向系统发送特定的字符串,遥控跟随机器人系统进退、转动等。该设计的实现能够有效减轻人的负重,提高运载效率。关键词:OpenMV视觉传感器;控制系统;AprilTag识别;跟随机器人中图分类号:TP273文献标识码:A文章编号:1009-3044(2023)06-0015-03开放科学(资源服务)标识码(OSID):0引言互联网和人工智能的飞速发展推动了机器人技术的高速发展。机器人视觉跟随技术作为应用非常广泛且实用的关键技术越来越受到重视。视觉跟踪机器人[1]模仿了生物行为,使机器人可以通过传感器获取外界信息通过计算做出相应的判断使得机器人更加智能化,双模控制[2]可以更好地面对复杂环境,使机器人可以处理更加复杂的问题[3]。国外的跟随机器人发展较早,已有相对成熟的应用,现如今私人货物运输机器人Gita和沃尔玛购物车Budgee的应用,都为劳累的人们提供了便捷的服务。本质上,它们都是具有识别定位和跟随功能的移动机器人。在国内上海交通大学设计的具有高性能和低功耗的优点移动跟随机器人代表着国内的领先水平。黄梦雨的零转径跟随机器人控制系统设计,实现了用超宽带定位技术实现机器人的跟随服务功能,面对复杂环境的能力还有待增强。徐军设计的双模控制跟随机器人,可以较好地实现跟随行走和双模控制。本文相对于上述的机器人而言,在双模控制的基础上,采用PWM控制进行位置跟随,电机调速通过PWM控制,占空比不同,输出模拟电压的平均值不同,由此来控制电机实现调速[4]。可以更好地应对复杂环境,识别精度也可有一定程度的提高。主要从以下四方面展开:(1)使用搭载OV7725摄像头的OpenMV视觉传感器模块来采集图像信息,同时将图像信息上传给主控芯片;(2)系统的微控制器是STM32F765,为了提高识别目标人物的速率,确保系统的实时性,CPU在获取到图像...