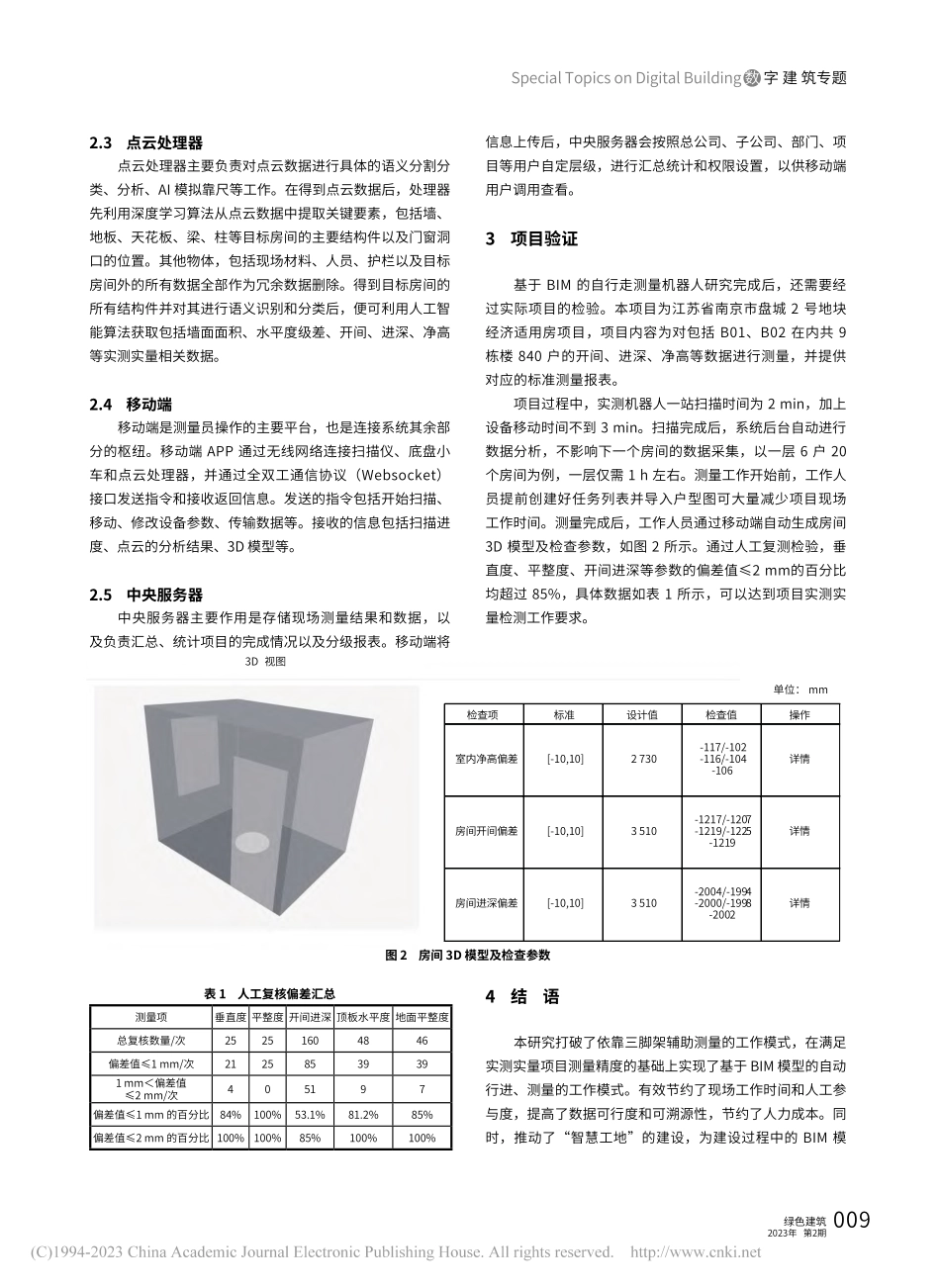
SpecialTopicsonDigitalBuilding数字建筑专题绿色建筑2023年第2期007基于BIM的自行走测量机器人研究与应用基于BIM的自行走测量机器人研究与应用顾波1,闫国祚1,俞方罡1,叶嵩1,杨燕2,韩立芳2(1.南京中建八局智慧科技有限公司,江苏南京210046;2.中国建筑第八工程局有限公司,上海200131)摘要:建筑施工过程中,建造和竣工验收工程中需要大量的实测实量工作。传统的实测实量方式主要依靠人工使用靠尺、卷尺等工具手动测量,存在作业耗时耗力、数据可靠性差、主观性强等缺点,因而研发出一套基于BIM的自行走测量机器人用于工程中的实测实量工作。主要利用底盘小车通过BIM模型生成的地图行驶到指定位置后使用三维激光扫描仪采集高精度点云数据,并通过设备内置计算机利用人工智能算法自动分析数据并生成报表,实现了单人单设备测量、结果自动生成等功能。在满足实测实量检测精度要求的基础上,节省了人力资源、提高了工作效率,降低了生产成本。关键词:实测实量;三维扫描;数据分析;智能建造;自行走中图分类号:TU731.3TP242文献标志码:A文章编号:1674-814X(2023)02-007-04建筑施工过程中,建造和竣工验收过程需要大量的实测实量工作[1]。实测实量是指应用测量仪器,通过现场测试建筑室内空间尺寸(包括长、宽、高等)、丈量得到能真实反映产品质量数据的一种方法。2015年,住房和城乡建设部充分总结工程实践经验并参考国际标准后发布了GB50204—2015《混凝土结构工程施工质量验收规范》,对混凝土结构工程增加了结构位置和尺寸偏差的规定[2]。然而目前传统的实测实量方式存在测量人员培训周期长、测量工作耗时、维保仪器多、人为操作和读数存在误差等缺点,加上当前进场务工人员数量大幅度减少且呈现老年化态势,人力成本急剧上升[3]。2021年,发展智能建造被纳入国家“十四五”规划纲要。2022年1月,住房和城乡建设部印发《“十四五”建筑业发展规划》,进一步提出推动智能建造与新型建筑工业化协同发展,加快建筑业转型升级,实现绿色低碳发展[4]。因此研究一款基于建筑信息模型(BIM)的自行走测量机器人,能够根据BIM生成的地图自动行驶到指定位置进行数据采集、分析、生成报表等工作,既是行业现状的要求,也是行业发展的趋势,能够使建筑质量检测这一工序自动化、智能化,逐步向“智慧工地”迈进。1研究综述1.1国内外研究现状目前,国外在智能检测设备方面的使用和应用较早,如奥地利维也纳技术大学的卡门教授等人于1983年就采用...