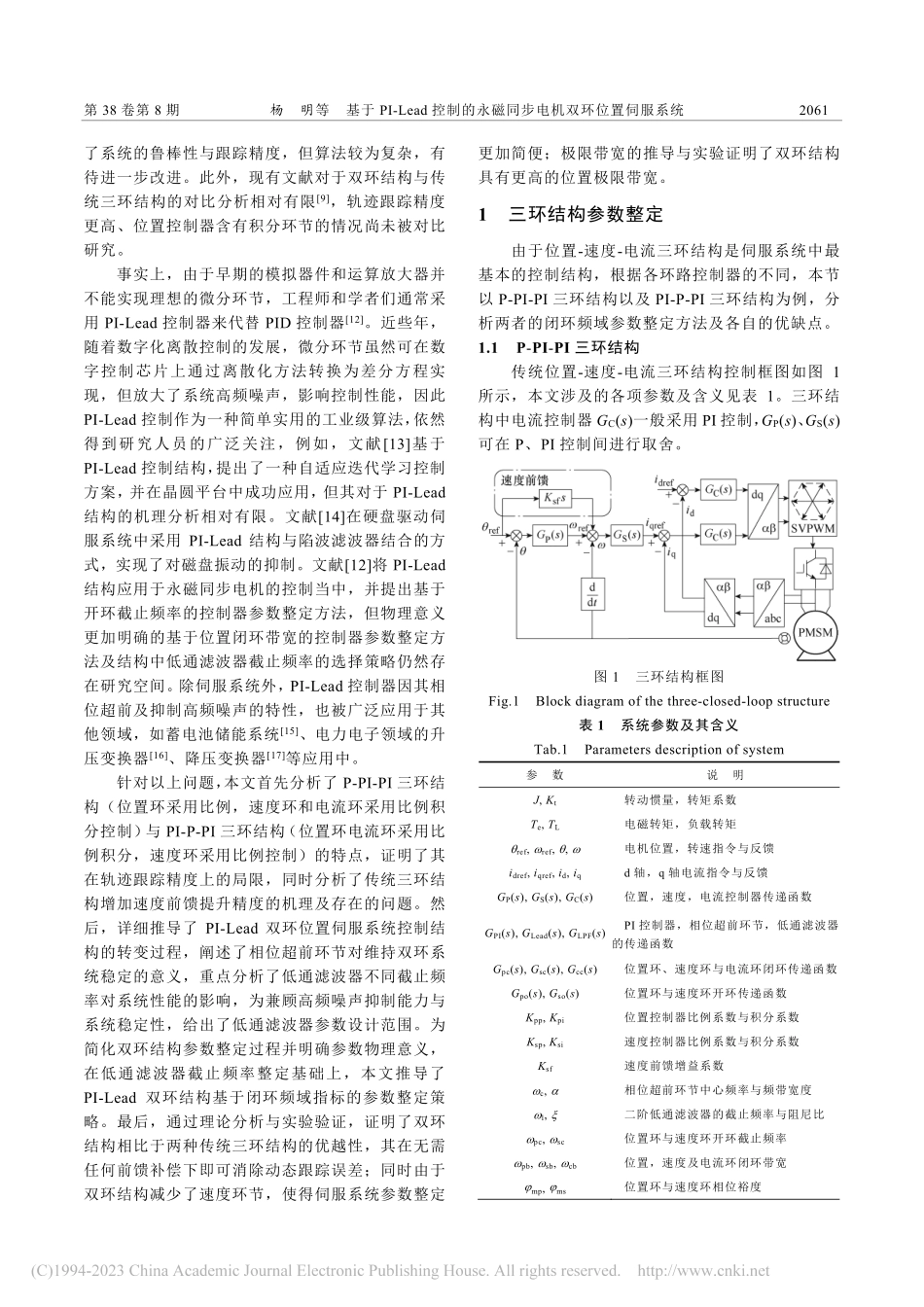
2023年4月电工技术学报Vol.38No.8第38卷第8期TRANSACTIONSOFCHINAELECTROTECHNICALSOCIETYApr.2023DOI:10.19595/j.cnki.1000-6753.tces.220166基于PI-Lead控制的永磁同步电机双环位置伺服系统杨明刘铠源陈扬洋徐殿国(哈尔滨工业大学电气工程及自动化学院哈尔滨150001)摘要为提高位置伺服系统轨迹跟踪精度及极限带宽,该文研究了一种位置-电流双环伺服结构,其位置控制采用结合相位超前环节的比例积分控制器(PI-Lead)。首先,探讨了P-PI-PI和PI-P-PI两种传统三环位置控制结构在轨迹跟踪精度上存在的局限,研究了速度前馈提升精度的机理及问题;然后,证明了PI-Lead双环结构相位超前环节对维持系统稳定的意义,详细分析了低通滤波器对系统性能的影响及其参数设计方法,给出了PI-Lead双环位置伺服系统基于闭环频域指标的参数整定策略;最后,对比分析了双环结构与传统三环结构的特点,推导了三种结构的位置极限带宽。实验结果表明,PI-Lead双环结构无需任何前馈补偿即可基本消除系统动态跟踪误差,并具有更高的位置环极限带宽。此外,由于减少了速度控制环节,其无需速度测量且参数整定更加简单。关键词:永磁同步电机无速度环位置伺服动态跟踪误差参数整定策略中图分类号:TM3510引言交流位置伺服系统被广泛应用于光刻机、激光雷达、航空航天等领域[1-2]。如何进一步提升高精度位置伺服系统的轨迹跟踪精度和动态响应速度已成为研究的重点与难点之一[3]。位置-速度-电流三环嵌套式结构在位置伺服系统中被广泛使用[4]。但对于一些位置轨迹跟踪精度要求严格的场合,一方面,速度环节会为系统引入一个大惯性延时环节,影响系统的动态响应性能;另一方面,受编码器精度与转速测量方法的影响,转速量化误差会直接影响系统的轨迹跟踪精度。针对此问题,文献[5]在传统三环结构的基础上,为系统引入速度前馈与加速度前馈补偿环节,提高了系统的跟踪精度。但前馈量的获取需要对位置指令微分处理,指令中所含的阶跃分量及高频噪声将被放大,严重降低了系统的轨迹跟踪精度。当负载、位置指令变化时,前馈增益需重新整定,以增强轨迹跟踪能力。为此,文献[6]提出一种基于微分观测器的高信噪比数字前馈补偿方法,提高了伺服系统的前馈补偿效果。文献[7]将自适应滑模控制与迭代学习控制结合进行前馈补偿,以改善位置伺服系统的轨迹跟踪精度与鲁棒性,但算法复杂度增加。上述方法均在位置-速度-电流三环嵌套式结构基础上增加前馈环节,减小位置伺服系统的跟踪误差...