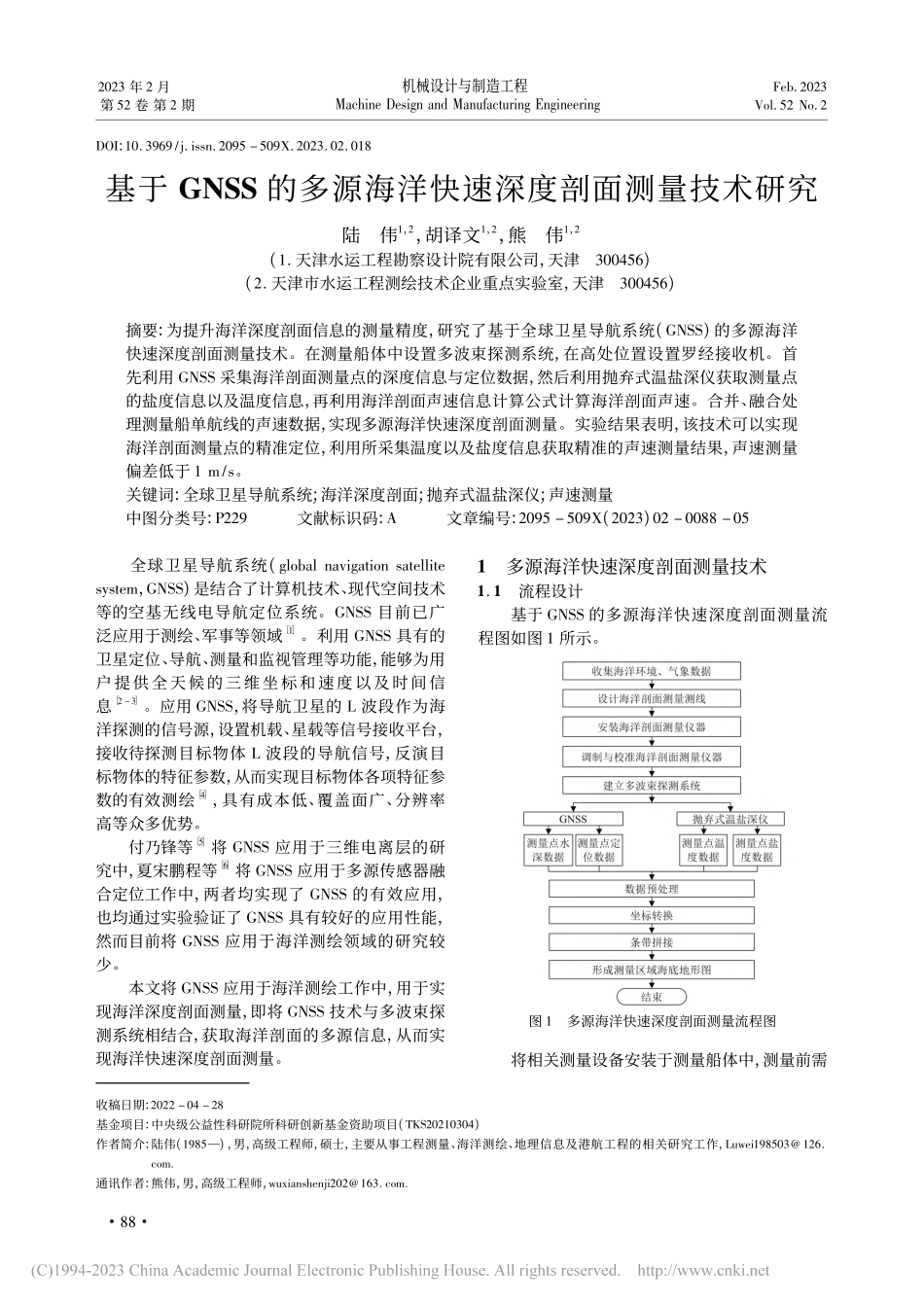
DOI:10.3969/j.issn.2095-509X.2023.02.018基于GNSS的多源海洋快速深度剖面测量技术研究陆伟1,2,胡译文1,2,熊伟1,2(1.天津水运工程勘察设计院有限公司,天津300456)(2.天津市水运工程测绘技术企业重点实验室,天津300456)摘要:为提升海洋深度剖面信息的测量精度,研究了基于全球卫星导航系统(GNSS)的多源海洋快速深度剖面测量技术。在测量船体中设置多波束探测系统,在高处位置设置罗经接收机。首先利用GNSS采集海洋剖面测量点的深度信息与定位数据,然后利用抛弃式温盐深仪获取测量点的盐度信息以及温度信息,再利用海洋剖面声速信息计算公式计算海洋剖面声速。合并、融合处理测量船单航线的声速数据,实现多源海洋快速深度剖面测量。实验结果表明,该技术可以实现海洋剖面测量点的精准定位,利用所采集温度以及盐度信息获取精准的声速测量结果,声速测量偏差低于1m/s。关键词:全球卫星导航系统;海洋深度剖面;抛弃式温盐深仪;声速测量中图分类号:P229文献标识码:A文章编号:2095-509X(2023)02-0088-05全球卫星导航系统(globalnavigationsatellitesystem,GNSS)是结合了计算机技术、现代空间技术等的空基无线电导航定位系统。GNSS目前已广泛应用于测绘、军事等领域[1]。利用GNSS具有的卫星定位、导航、测量和监视管理等功能,能够为用户提供全天候的三维坐标和速度以及时间信息[2-3]。应用GNSS,将导航卫星的L波段作为海洋探测的信号源,设置机载、星载等信号接收平台,接收待探测目标物体L波段的导航信号,反演目标物体的特征参数,从而实现目标物体各项特征参数的有效测绘[4],具有成本低、覆盖面广、分辨率高等众多优势。付乃锋等[5]将GNSS应用于三维电离层的研究中,夏宋鹏程等[6]将GNSS应用于多源传感器融合定位工作中,两者均实现了GNSS的有效应用,也均通过实验验证了GNSS具有较好的应用性能,然而目前将GNSS应用于海洋测绘领域的研究较少。本文将GNSS应用于海洋测绘工作中,用于实现海洋深度剖面测量,即将GNSS技术与多波束探测系统相结合,获取海洋剖面的多源信息,从而实现海洋快速深度剖面测量。1多源海洋快速深度剖面测量技术1.1流程设计基于GNSS的多源海洋快速深度剖面测量流程图如图1所示。图1多源海洋快速深度剖面测量流程图将相关测量设备安装于测量船体中,测量前需收稿日期:2022-04-28基金项目:中央级公益性科研院所科研创新基金资助项目(TKS20210304)作者简介:陆伟(1985—),男,高级工程师,硕...