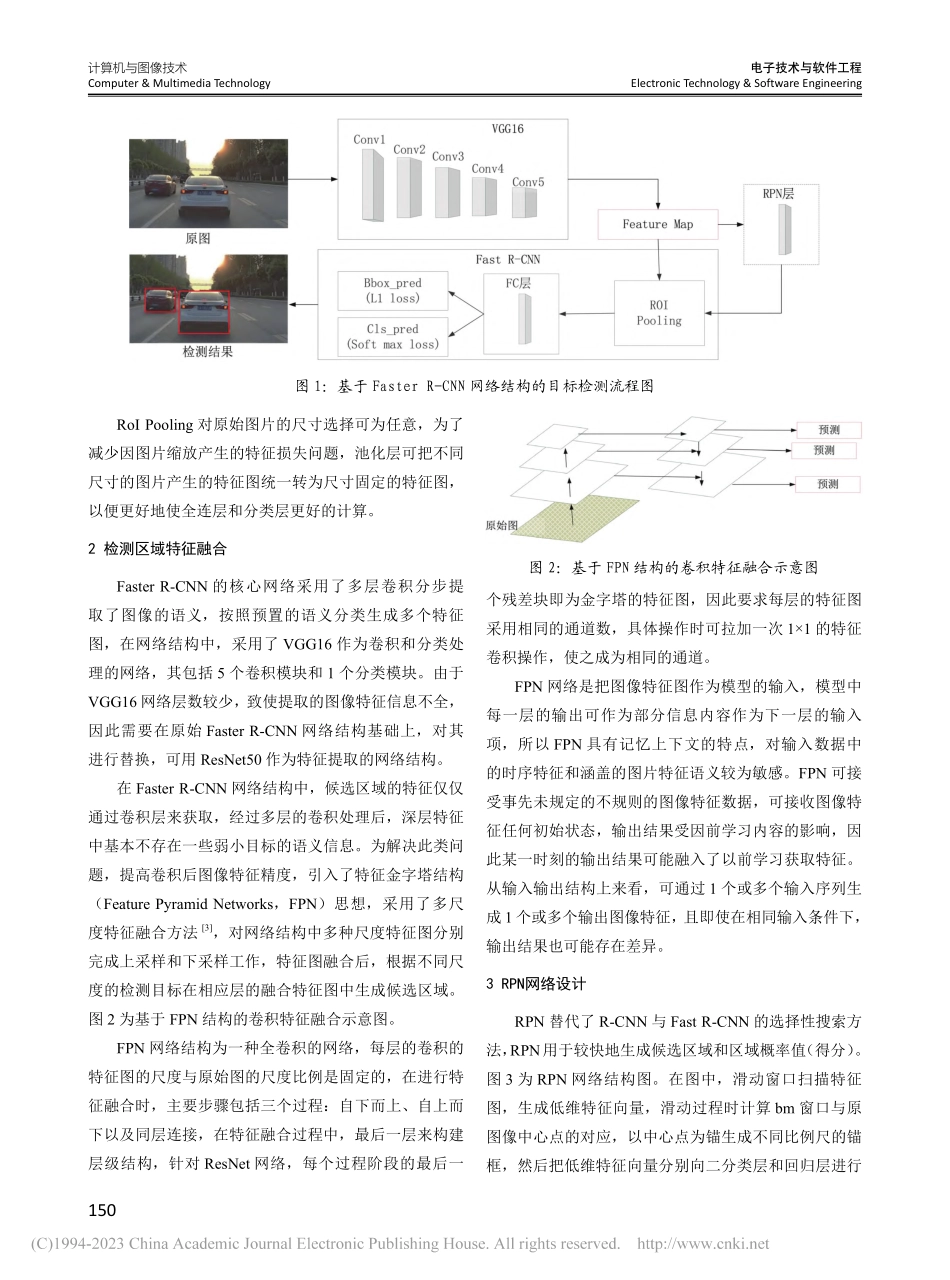
计算机与图像技术Computer&MultimediaTechnology电子技术与软件工程ElectronicTechnology&SoftwareEngineering149近几年来电动汽车的逐渐普及,电动汽车与传统汽车相比,除了绿色环保外,其更多应用了大数据、机器学习等技术,智能驾驶即通过机器学习或深度模型,分析大数据样本来实现的,其与一般的机器学习场景相比,其时效性、运算性能要求更高,5G技术的出现,为汽车智能驾驶提供了数据感知与数据通信基础。当前目标检测成为计算机视觉领域的重要研究方向,研究目标就是在图像中的位置确定目标所属类型。道路目标即车辆在行驶过程中具有较大意义的目标,如车辆、行人、障碍物等,对目标进行定位、识别是智能驾驶的重要环节。随着城市化进程的发展,城市道路交通流量越来越多,需要识别的道路目标越来越多。目标检测已成为智能驾驶的重要技术,通过目标检测能够自动、高效地识别出道路前方的目标,为智能汽车的变速、变道等操作提供支持。卷积神经网对图像进行卷积、池化、输出等多层组合操作,完成提取图像语义,处理过程具有特征提取高效、泛化能力强特点。目标检测算法中,传统的算法分为一阶段目标检测和两阶段目标检测两种,其中一阶段目标检测是预测图片中圈定范围内的类型、偏移量等,如YOLO[1]、SSD算法[2];两阶段目标检测算法是首先做初步检测,然后生成候选区域并对其进行详细分类和微调,如FastR-CNN。本文在FastR-CNN模型基础上,提出了基于FasterR-CNN模型的城市道路目标检测方法。FasterR-CNN是在FastR-CNN基础上提出了基于RPN(RegionProposalNetwork)候选区域选择,同时把候选区域、选取特征图、检测目标和位置放在同一个网络模型中,提高了检测效率和检测的准确性,提高了检测模型的性能。1FasterR-CNN的基本原理FasterR-CNN网络模型包括4部分,分别为卷积层部分、RPN层、池化层和全连接FC层,FasterR-CNN检测流程图如图1所示。首先输入图像,经过VGG16的特征提取,来获取区域建议网络(RPN)需要的全部特征。RPN利用特征图生成若干个候选区域以及每个区域的概率值,按照非极大值抑制方法对候选区域的概率值进行计算,经过RPN网络产生的候选区域进行映射处理,投影到特征图上,通过投影获得特征矩阵,把得分最高的区域放入感兴趣区域的池化层ROIpooling(Regionofinterest)。候选框的特征图经ROIpooling处理后,缩放到7×7大小,分别送入目标分类和回归两个分支,计算出分类结果,同时通过回归预测,获取边界框区域,即通过...