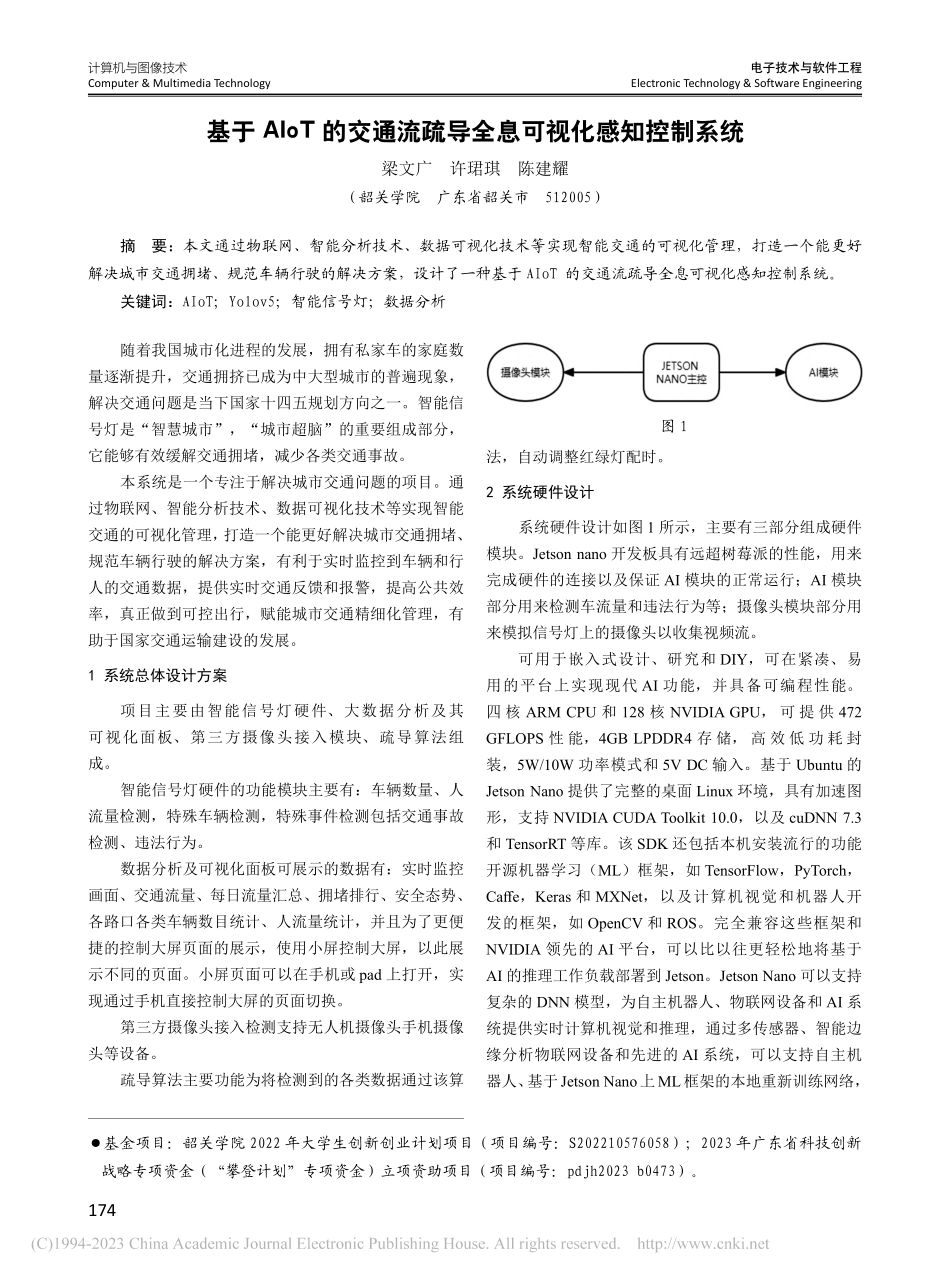
计算机与图像技术Computer&MultimediaTechnology电子技术与软件工程ElectronicTechnology&SoftwareEngineering174随着我国城市化进程的发展,拥有私家车的家庭数量逐渐提升,交通拥挤已成为中大型城市的普遍现象,解决交通问题是当下国家十四五规划方向之一。智能信号灯是“智慧城市”,“城市超脑”的重要组成部分,它能够有效缓解交通拥堵,减少各类交通事故。本系统是一个专注于解决城市交通问题的项目。通过物联网、智能分析技术、数据可视化技术等实现智能交通的可视化管理,打造一个能更好解决城市交通拥堵、规范车辆行驶的解决方案,有利于实时监控到车辆和行人的交通数据,提供实时交通反馈和报警,提高公共效率,真正做到可控出行,赋能城市交通精细化管理,有助于国家交通运输建设的发展。1系统总体设计方案项目主要由智能信号灯硬件、大数据分析及其可视化面板、第三方摄像头接入模块、疏导算法组成。智能信号灯硬件的功能模块主要有:车辆数量、人流量检测,特殊车辆检测,特殊事件检测包括交通事故检测、违法行为。数据分析及可视化面板可展示的数据有:实时监控画面、交通流量、每日流量汇总、拥堵排行、安全态势、各路口各类车辆数目统计、人流量统计,并且为了更便捷的控制大屏页面的展示,使用小屏控制大屏,以此展示不同的页面。小屏页面可以在手机或pad上打开,实现通过手机直接控制大屏的页面切换。第三方摄像头接入检测支持无人机摄像头手机摄像头等设备。疏导算法主要功能为将检测到的各类数据通过该算法,自动调整红绿灯配时。2系统硬件设计系统硬件设计如图1所示,主要有三部分组成硬件模块。Jetsonnano开发板具有远超树莓派的性能,用来完成硬件的连接以及保证AI模块的正常运行;AI模块部分用来检测车流量和违法行为等;摄像头模块部分用来模拟信号灯上的摄像头以收集视频流。可用于嵌入式设计、研究和DIY,可在紧凑、易用的平台上实现现代AI功能,并具备可编程性能。四核ARMCPU和128核NVIDIAGPU,可提供472GFLOPS性能,4GBLPDDR4存储,高效低功耗封装,5W/10W功率模式和5VDC输入。基于Ubuntu的JetsonNano提供了完整的桌面Linux环境,具有加速图形,支持NVIDIACUDAToolkit10.0,以及cuDNN7.3和TensorRT等库。该SDK还包括本机安装流行的功能开源机器学习(ML)框架,如TensorFlow,PyTorch,Caffe,Keras和MXNet,以及计算机视觉和机器人开发的框架,如OpenCV和ROS。完全兼容这些框架和NVIDIA领先的AI平台,可以比以往更轻...