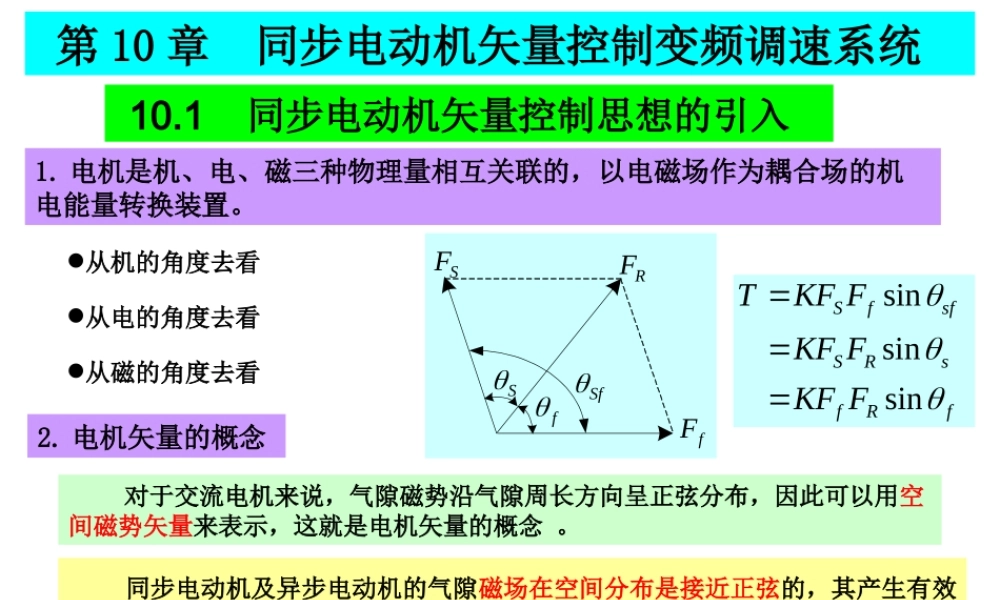
第10章同步电动机矢量控制变频调速系统10.1同步电动机矢量控制思想的引入1.电机是机、电、磁三种物理量相互关联的,以电磁场作为耦合场的机电能量转换装置。从机的角度去看从电的角度去看从磁的角度去看同步电动机及异步电动机的气隙磁场在空间分布是接近正弦的,其产生有效转矩的工作磁场是磁场的基波分量,这就使同步电动机及异步电动机分析及运算中对磁场可以采用空间矢量的方法来分析及运算,对电压、电流等可以采用时间相量的方法来分析及运算,这个条件也为这类电机采用矢量控制奠定了基础。2.电机矢量的概念SFRFfFSffSsinsinsinSfsfSRsfRfTKFFKFFKFF对于交流电机来说,气隙磁势沿气隙周长方向呈正弦分布,因此可以用空间磁势矢量来表示,这就是电机矢量的概念。•自控式变频的同步电动机与他控式变频系统相比较具有不会失步等明显的优点。因此,根据定子磁势的位置是由转子位置所决定的特点,使其与转子的磁极轴线(或气隙磁场轴线)保持一个的恒定值,即使与垂直或使与垂直,则定子磁势的旋转速度(也即变频器的输出频率)是跟随转子旋转速度的变化而变化。这就是同步电动机的磁场定向控制或通常所说的“矢量控制”。90SFfFRFSF3.自控式变频的优缺点4.矢量控制思想的引入若能使电机定、转子磁势的夹角在任何时候都保持同一个值,那么只要定子电流恒定,其力矩也就不再脉动。控制效果将更好。•六拍型供电的变频电路使电机定子磁势只有6个空间位置状态,定子旋转磁势是一个步进式的旋转磁势,每一个定子磁势要对应于转子60°电角度的位置区域,可知,力矩的脉动也就不可避免。SFRFfFSffSsinsinsinSfsfSRsfRfTKFFKFFKFF10.2同步电动机的坐标变换10.2.1电机坐标变换的概念定子旋转磁势既可以由:定子三相绕组通入对称的三相交流电流产生(静止的三相a、b、c系统),定子两相绕组通入对称的两相交流电流产生(静止的α、β、0系统),定子直流励磁绕组生成固定磁场,把“定子”旋转起来产生(旋转的d、q、0系统),a)静止的三相系统b)静止的二相系统c)旋转的二相系统•对产生同样旋转磁场的这些不同形式的绕组可以相互替换而不会影响电机的转矩、转速。这种绕组的替换从数学概念上看是同一个旋转磁势在不同坐标系下的不同表示法而已,这种替换过程就是电机坐标变换。c)1adqb)120120120a)abc10.2.2综合矢量电机学中已知,三相电机定子绕组中通...