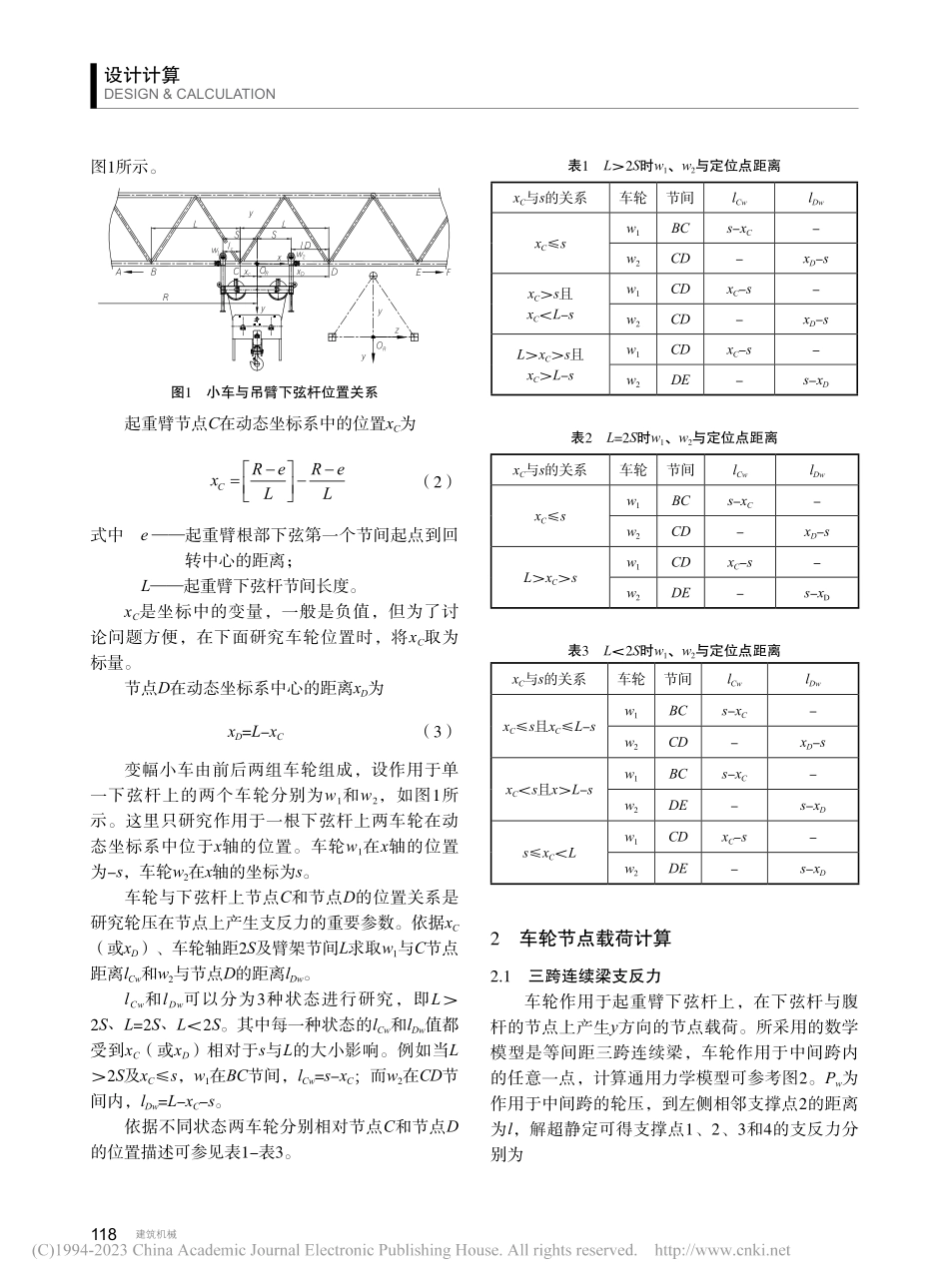
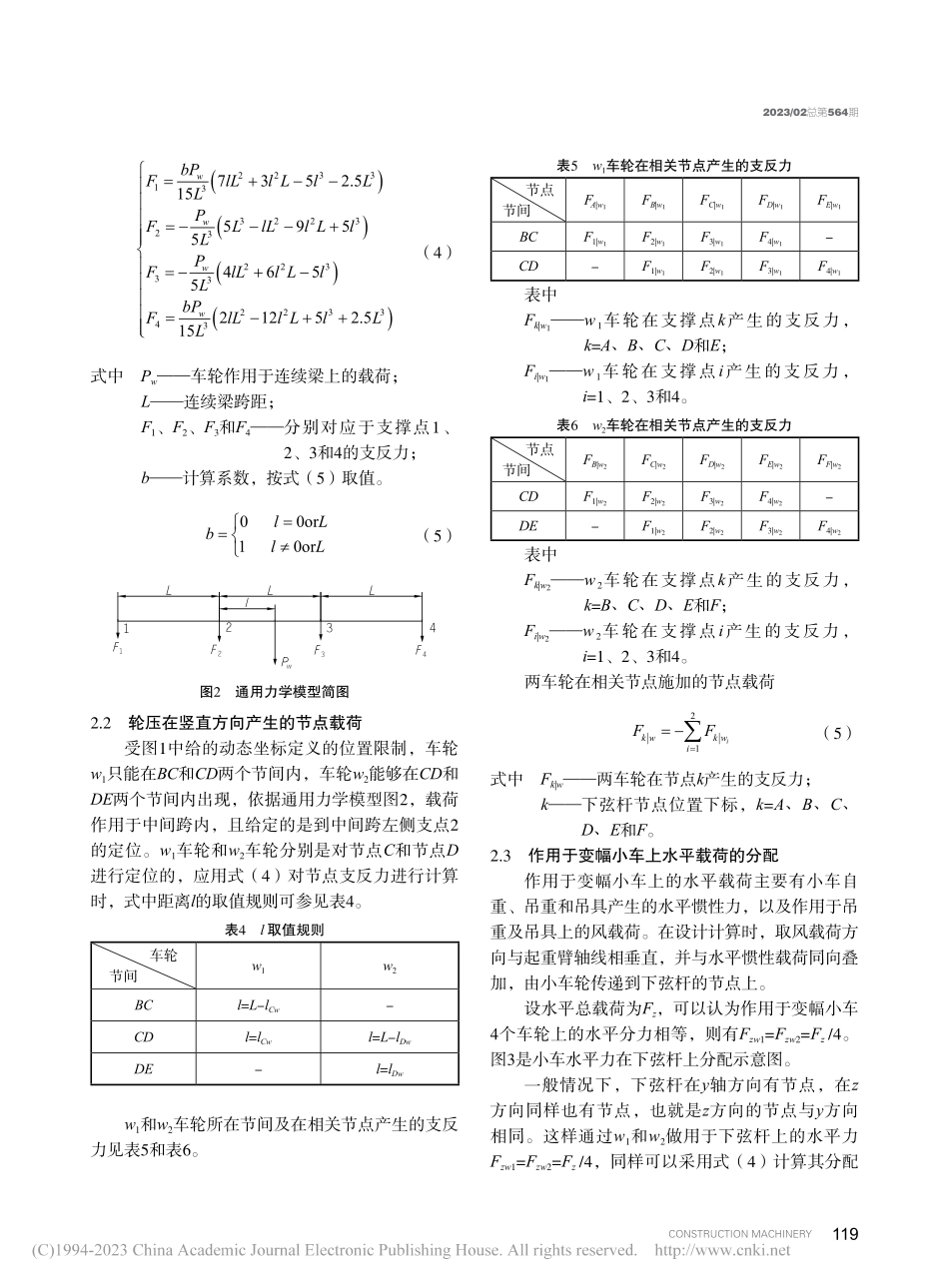
CONSTRUCTIONMACHINERY1172023/02总第564期平臂式塔机变幅小车作用于起重臂上节点载荷的研究车军平1,丁国林2,李斌1,罗继曼1(1.沈阳建筑大学机械工程学院,辽宁沈阳110168;2.内蒙古自治区特种设备检验研究院赤峰分院,内蒙古赤峰024000)[摘要]平臂式塔机变幅小车车轮作用在起重臂下弦杆的轮压,会在下弦杆的节点上产生节点载荷,这种节点载荷是有限元计算加载的依据。本文将小车所在下弦杆简化为连续梁模型,通过力法求解车轮在任意位置三跨连续梁的支反力,依据小车轴距、下弦杆节间跨距以及小车所在位置,推导出三跨连续梁4个支点的支反力。将同一下弦杆上两车轮分别产生的支反力进行叠加,得到各支点处支反力总和,其负向值作为该节点的加载载荷。这种方法既适用于竖向轮压,也适用于水平载荷。[关键词]平臂式塔机;连续梁;轮压;节点载荷[中图分类号]TH213.3[文献标识码]B[文章编号]1001-554X(2023)02-0117-04ResearchonnodeloadoftrolleyactingonflatjiboftowercraneCHEJun-ping,DINGGuo-lin,LIBin,LUOJi-man平臂式塔机起重臂在进行有限元计算中,起重臂上施加的载荷有两类,一类是固定于起重臂上的载荷,包括起重臂的自重及自重引起的惯性力、安装于起重臂上的机构自重及其惯性力以及作用于起重臂上的风载荷;另一类是作用于起重臂上的活动载荷,包括变幅小车、吊具和吊重等。对于活动载荷,需要考虑变幅小车所在的幅度处轮压对起重臂下弦杆相关节点产生的作用力,以求得较为准确的节点载荷。特别是在起重臂参数化计算中,需要自动求取节点的加载力,构建依据工作幅度、下弦杆节点间距和小车轮距为变量的节点加载函数。本文讨论活动载荷依据起重特性在下弦杆节点上产生作用载荷的计算方法,将下弦杆简化成小车轮所在位置为中心跨的三跨连续梁,求取轮压作用下的三跨四支点的支反力,并将两车轮作用产生的支反力在相关节点进行叠加,作为节点的加载载荷作用于相关节点上。1车轮位置与下弦杆节点的位置关系活动载荷在起重臂上的加载,是依据起重特性进行的。一般情况下,在工作幅度R处起重小车对起重臂的垂直作用载荷可表示为Pq=φ2(F(R)+G)+c(1)式中Pq——在工作幅度R处作用在起重臂上的活动载荷;φ2——起升动载系数;G——吊具和起升绳的自重载荷;F(R)——与起重特性相适应,在工作幅度R处的额定起升载荷;c——变幅小车的自重载荷。依据式(1)可以求得小车在下弦杆上产生的轮压。以起重臂所有节间长度都相...