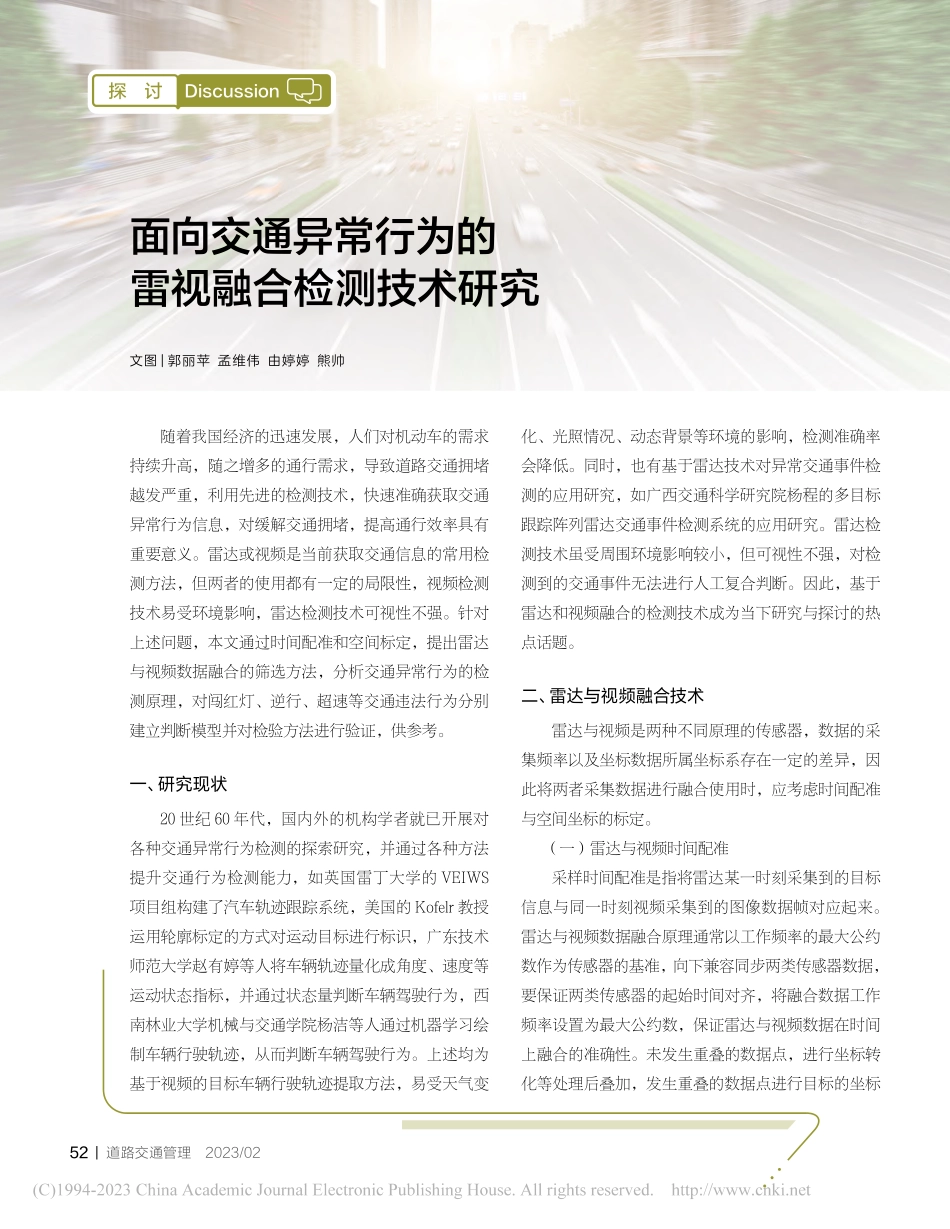
面向交通异常行为的雷视融合检测技术研究文图|郭丽苹孟维伟由婷婷熊帅随着我国经济的迅速发展,人们对机动车的需求持续升高,随之增多的通行需求,导致道路交通拥堵越发严重,利用先进的检测技术,快速准确获取交通异常行为信息,对缓解交通拥堵,提高通行效率具有重要意义。雷达或视频是当前获取交通信息的常用检测方法,但两者的使用都有一定的局限性,视频检测技术易受环境影响,雷达检测技术可视性不强。针对上述问题,本文通过时间配准和空间标定,提出雷达与视频数据融合的筛选方法,分析交通异常行为的检测原理,对闯红灯、逆行、超速等交通违法行为分别建立判断模型并对检验方法进行验证,供参考。一、研究现状20世纪60年代,国内外的机构学者就已开展对各种交通异常行为检测的探索研究,并通过各种方法提升交通行为检测能力,如英国雷丁大学的VEIWS项目组构建了汽车轨迹跟踪系统,美国的Kofelr教授运用轮廓标定的方式对运动目标进行标识,广东技术师范大学赵有婷等人将车辆轨迹量化成角度、速度等运动状态指标,并通过状态量判断车辆驾驶行为,西南林业大学机械与交通学院杨洁等人通过机器学习绘制车辆行驶轨迹,从而判断车辆驾驶行为。上述均为基于视频的目标车辆行驶轨迹提取方法,易受天气变化、光照情况、动态背景等环境的影响,检测准确率会降低。同时,也有基于雷达技术对异常交通事件检测的应用研究,如广西交通科学研究院杨程的多目标跟踪阵列雷达交通事件检测系统的应用研究。雷达检测技术虽受周围环境影响较小,但可视性不强,对检测到的交通事件无法进行人工复合判断。因此,基于雷达和视频融合的检测技术成为当下研究与探讨的热点话题。二、雷达与视频融合技术雷达与视频是两种不同原理的传感器,数据的采集频率以及坐标数据所属坐标系存在一定的差异,因此将两者采集数据进行融合使用时,应考虑时间配准与空间坐标的标定。(一)雷达与视频时间配准采样时间配准是指将雷达某一时刻采集到的目标信息与同一时刻视频采集到的图像数据帧对应起来。雷达与视频数据融合原理通常以工作频率的最大公约数作为传感器的基准,向下兼容同步两类传感器数据,要保证两类传感器的起始时间对齐,将融合数据工作频率设置为最大公约数,保证雷达与视频数据在时间上融合的准确性。未发生重叠的数据点,进行坐标转化等处理后叠加,发生重叠的数据点进行目标的坐标探讨Discussion52|道路交通管理2023/02具有可视性强,像素元素丰富的特点。在实际...