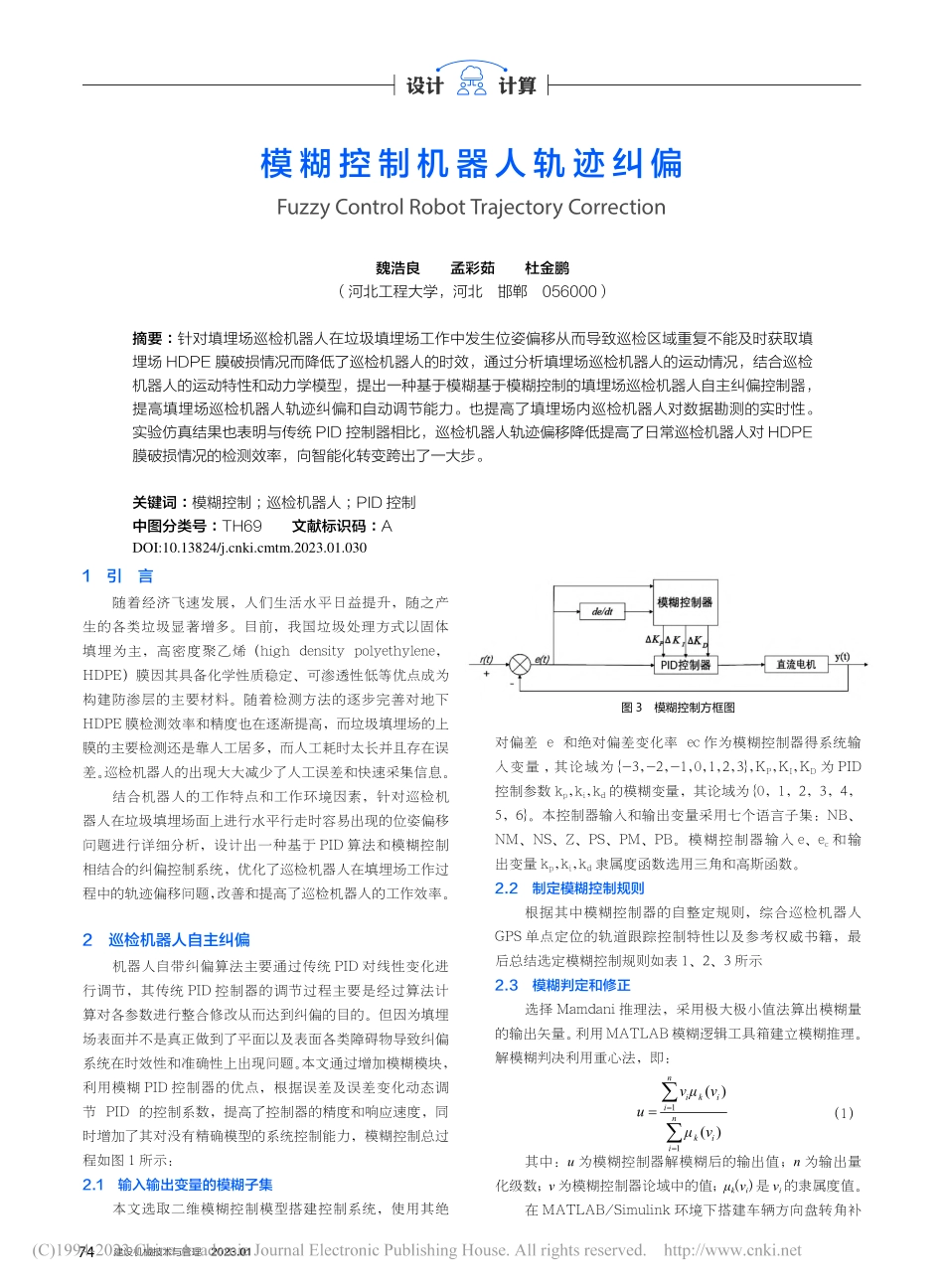
74建设机械技术与管理2023.01设计计算1引言随着经济飞速发展,人们生活水平日益提升,随之产生的各类垃圾显著增多。目前,我国垃圾处理方式以固体填埋为主,高密度聚乙烯(highdensitypolyethylene,HDPE)膜因其具备化学性质稳定、可渗透性低等优点成为构建防渗层的主要材料。随着检测方法的逐步完善对地下HDPE膜检测效率和精度也在逐渐提高,而垃圾填埋场的上膜的主要检测还是靠人工居多,而人工耗时太长并且存在误差。巡检机器人的出现大大减少了人工误差和快速采集信息。结合机器人的工作特点和工作环境因素,针对巡检机器人在垃圾填埋场面上进行水平行走时容易出现的位姿偏移问题进行详细分析,设计出一种基于PID算法和模糊控制相结合的纠偏控制系统,优化了巡检机器人在填埋场工作过程中的轨迹偏移问题,改善和提高了巡检机器人的工作效率。2巡检机器人自主纠偏机器人自带纠偏算法主要通过传统PID对线性变化进行调节,其传统PID控制器的调节过程主要是经过算法计算对各参数进行整合修改从而达到纠偏的目的。但因为填埋场表面并不是真正做到了平面以及表面各类障碍物导致纠偏系统在时效性和准确性上出现问题。本文通过增加模糊模块,利用模糊PID控制器的优点,根据误差及误差变化动态调节PID的控制系数,提高了控制器的精度和响应速度,同时增加了其对没有精确模型的系统控制能力,模糊控制总过程如图1所示:2.1输入输出变量的模糊子集本文选取二维模糊控制模型搭建控制系统,使用其绝对偏差e和绝对偏差变化率ec作为模糊控制器得系统输入变量,其论域为{-3,-2,-1,0,1,2,3},KP,KI,KD为PID控制参数kp,ki,kd的模糊变量,其论域为{0,1,2,3,4,5,6}。本控制器输入和输出变量采用七个语言子集:NB、NM、NS、Z、PS、PM、PB。模糊控制器输入e、ec和输出变量kp,ki,kd隶属度函数选用三角和高斯函数。2.2制定模糊控制规则根据其中模糊控制器的自整定规则,综合巡检机器人GPS单点定位的轨道跟踪控制特性以及参考权威书籍,最后总结选定模糊控制规则如表1、2、3所示2.3模糊判定和修正选择Mamdani推理法,采用极大极小值法算出模糊量的输出矢量。利用MATLAB模糊逻辑工具箱建立模糊推理。解模糊判决利用重心法,即:11()()nikiinkiivvuvμμ===∑∑(1)其中:u为模糊控制器解模糊后的输出值;n为输出量化级数;v为模糊控制器论域中的值;μk(vi)是vi的隶属度值。在MATLAB/Simulink环境下搭建车辆方向盘转角补模糊控制机器人轨迹纠偏FuzzyControlRobotTra...