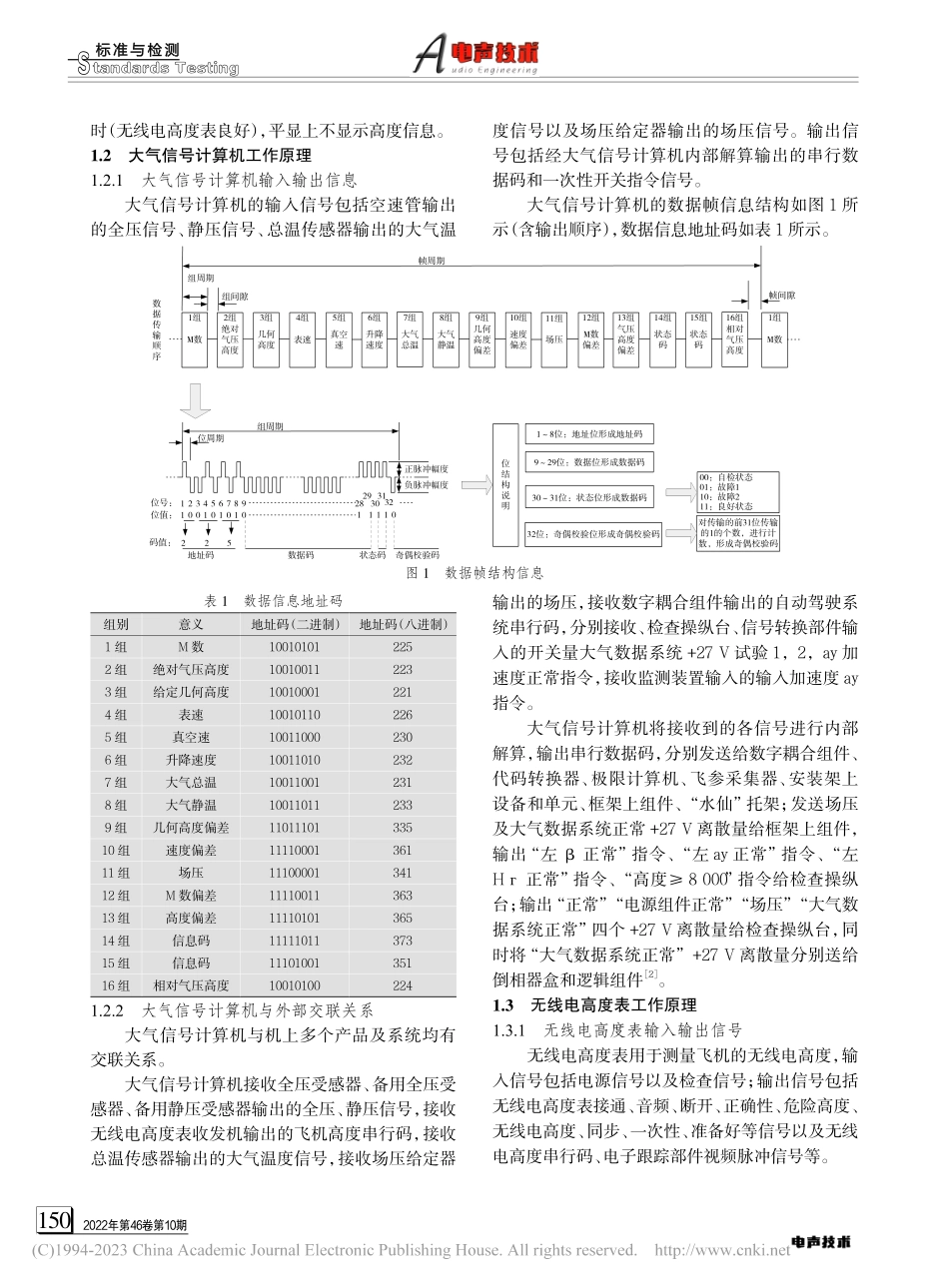
2022年第46卷第10期149StandardsTestinG标准与检测文献引用格式:秦素文,张玉梅,李根福.某型飞机高空状态高度跳变故障分析[J].电声技术,2022,46(10):149-152.QINSW,ZHANGYM,LIGF.Analysisofaltitudejumpfaultofacertainaircraftinhighaltitudestate[J].AudioEngineering,2022,46(10):149-152.中图分类号:TN912.2文献标识码:ADOI:10.16311/j.audioe.2022.10.042某型飞机高空状态高度跳变故障分析秦素文,张玉梅,李根福(大连长丰实业总公司,辽宁大连116038)摘要:针对一起某型飞机高空状态平显气压高度多次跳变为无线电高度的故障,通过故障现象分析和客观记录系统数据回放,发现无线电高度表故障以及大气信号计算机数据溢出。通过分析大气系统原理,分析可导致故障的诸多因素,定位故障点,进行故障复现和排除故障,提出了维修过程中的控制措施。关键词:串行数据码;高度跳变;雷达系统AnalysisofAltitudeJumpFaultofACertainAircraftinHighAltitudeStateQINSuwen,ZHANGYumei,LIGenfu(DalianChangfengIndustrialCorporation,Dalian116038,China)Abstract:Inthispaper,aimingatafaultthattheHUDbarometricaltitudeofacertaintypeofaircraftjumpstoradioaltitudeformanytimes,throughthefaultphenomenonanalysisandtheobjectiverecordingsystemdataplayback,theradioaltimeterfaultandtheatmosphericsignalcomputerdataoverflowarefound.Byanalyzingtheprincipleoftheatmosphericsystem,thepaperanalyzesmanyfactorsthatcanleadtofaults,locatesthefaultpoint,repeatsthefaultandeliminatesthefault,andputsforwardthecontrolmeasuresinthemaintenanceprocess.Keywords:serialdatacode;altitudejump;radarsystem0引言某机试飞后反馈:高空状态平显气压高度多次跳变为无线电高度。经地面验证,初步确认为大气信号计算机故障。经查,该大气信号计算机最初安装在某1号机进行试飞时,就出现了相同故障现象。当时,将该大气信号计算机返内场,将产品连接设备检查没有发现问题。于是串装至某2号机进行机上验证,装机后又出现故障,产品再次返内场检修,仍未发现问题。后又串装至某3号机,试飞时再次出现故障[1]。1系统原理平显上的高度信息分为气压高度和无线电高度(飞机几何高度)。两种高度信息均采用ARINC-429串行数据码形式进行传输。无线电高度表输出的高度信息串行码输出给大气信号计算机,由大气信号计算机完成气压高度...