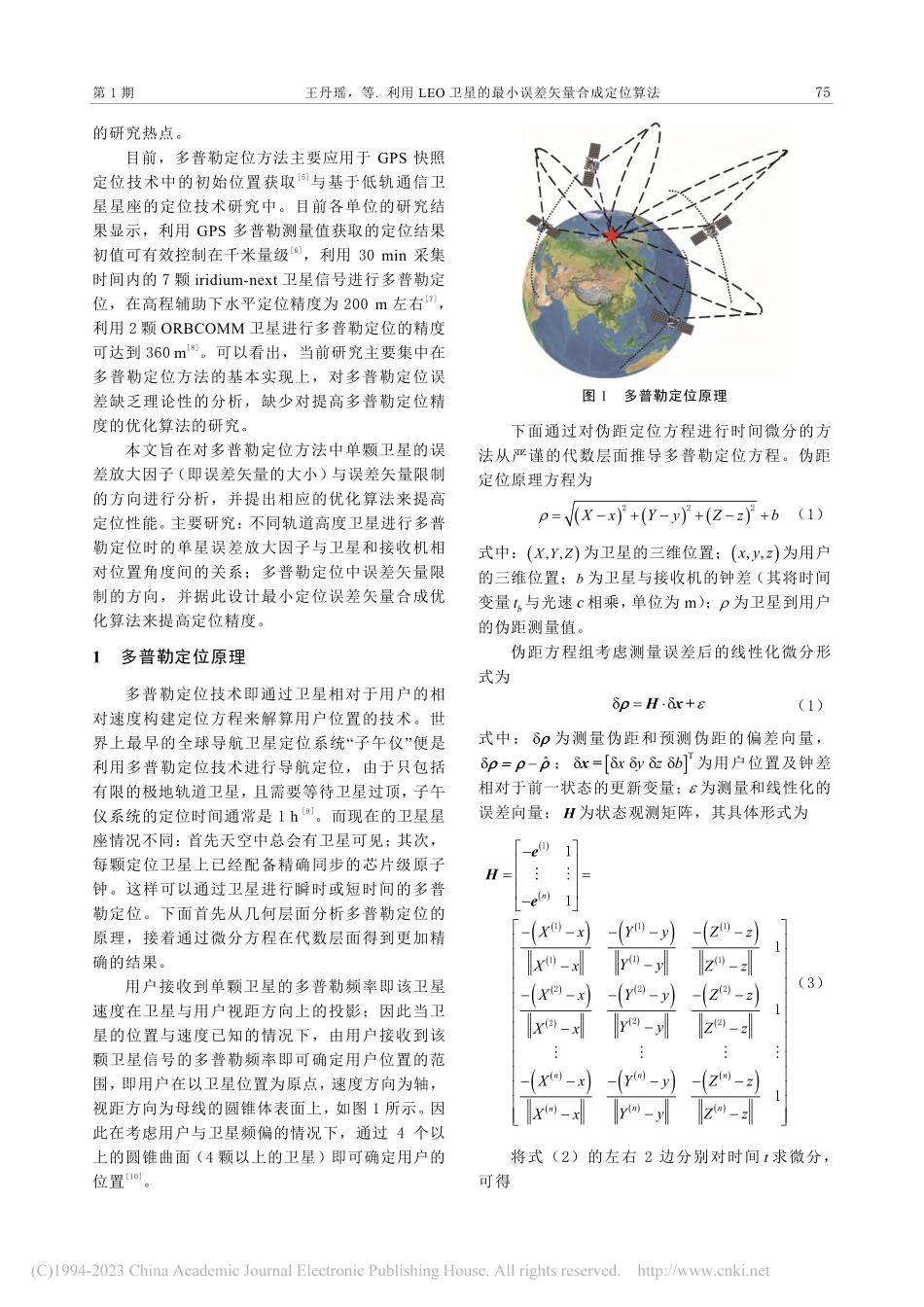
第11卷第1期导航定位学报Vol.11,No.12023年2月JournalofNavigationandPositioningFeb.,2023引文格式:王丹瑶,秦红磊,王元琳.利用LEO卫星的最小误差矢量合成定位算法[J].导航定位学报,2023,11(1):74-79.(WANGDanyao,QINHonglei,WANGYuanlin.MinimumerrorvectorsyntheticpositioningalgorithmusingLEOsatellites[J].JournalofNavigationandPositioning,2023,11(1):74-79.)DOI:10.16547/j.cnki.10-1096.20230111.利用LEO卫星的最小误差矢量合成定位算法王丹瑶,秦红磊,王元琳(北京航空航天大学电子信息工程学院,北京100191)摘要:针对利用低地球轨道(LEO)卫星信号进行多普勒定位时,由于缺乏定位误差矢量相关研究而使定位精度较差的问题,对多普勒定位误差矢量特性进行系统性的分析并提出一种最小定位误差矢量合成优化算法:以初始定位结果为中心划定区域网格,计算依次去除各颗卫星后定位误差向量在该卫星速度方向上的投影误差模之和;遍历所有网格,搜索投影误差模之和最大的位置网格作为优化的定位结果。实验结果表明:提出的算法的定位结果误差均值与均方根误差(RMSE)均有减小,其三维定位精度可提升40%以上。关键词:低地球轨道卫星信号;多普勒定位;误差矢量分析;优化算法;遍历网格中图分类号:P228文献标志码:A文章编号:2095-4999(2023)01-0074-06MinimumerrorvectorsyntheticpositioningalgorithmusingLEOsatellitesWANGDanyao,QINHonglei,WANGYuanlin(SchoolofElectronicandInformation,BeihangUniversity,Beijing100191,China)Abstract:AimingattheproblemofthepoorpositioningaccuracyduetolackofresearchonpositioningerrorvectorwhenDopplerpositioningiscarriedoutbyusinglowEarthorbit(LEO)satellitesignal,thepapersystematicallyanalyzedthecharacteristicsofDopplerpositioningerrorvector,andproposedaminimumpositioningerrorvectorsynthesisoptimizationalgorithm:theinitialpositioningresultwastakenasthecentertodelimittheregionalgrid,andthesumoftheprojectionerrormodulesofthepositioningerrorvectorinthespeeddirectionofthesatellitewascalculatedafterremovingeachsatelliteinturn;thenallgridsweretraversed,andthelocationgridswiththelargestsumoftheprojectionerrormodulesweresearchedastheoptimizedpositioningresult.Experimentalresultsshowedthatthemeanerrorandrootmeansquareerror(...